Apa itu LiDAR?
Oleh : Tike Aprillia Hartini
Teknologi light detection and ranging (LiDAR) saat ini telah banyak dikembangkan. Output LiDAR berupa data tiga dimensi (3D) dengan akurasi yang cukup tinggi dan pengambilan data yang lebih cepat menjadikan teknologi ini mulai banyak diaplikasikan dalam berbagai bidang. Sehingga, teknologi ini dapat digunakan sebagai alternatif dari teknologi pemetaan secara konvensional (pemetaan terestris).
Pada area pengukuran yang luas, LiDAR akan sangat efisien digunakan dibandingkan dengan metode pemetaan konvensional. Hal ini karena waktu pengambilan dan pemrosesan data dapat dilakukan lebih cepat. Selain itu output LiDAR sudah dalam bentuk digital, sehingga tidak perlu dilakukan proses digitalisasi.
Namun, teknologi LiDAR ini masih terdengar asing oleh orang awam. Sehingga, pada artikel ini akan dijelaskan mengenai apa itu LiDAR? Bagaimana prinsip kerja LiDAR? Apa saja output data LiDAR? Dan bagaimana pengaplikasian LiDAR dalam beberapa bidang?
LIGHT DETECTION AND RANGING (LIDAR)
LiDAR atau juga dikenal sebagai LADAR adalah akronim untuk light detection and ranging. LiDAR adalah teknologi yang menerapkan sistem penginderaan jauh sensor aktif untuk menentukan jarak dengan menembakkan sinar laser yang dipasang pada wahana pesawat. Jarak didapatkan dengan menghitung waktu antara ditembakkannya sinar laser dari sensor sampai diterima kembali oleh sensor.
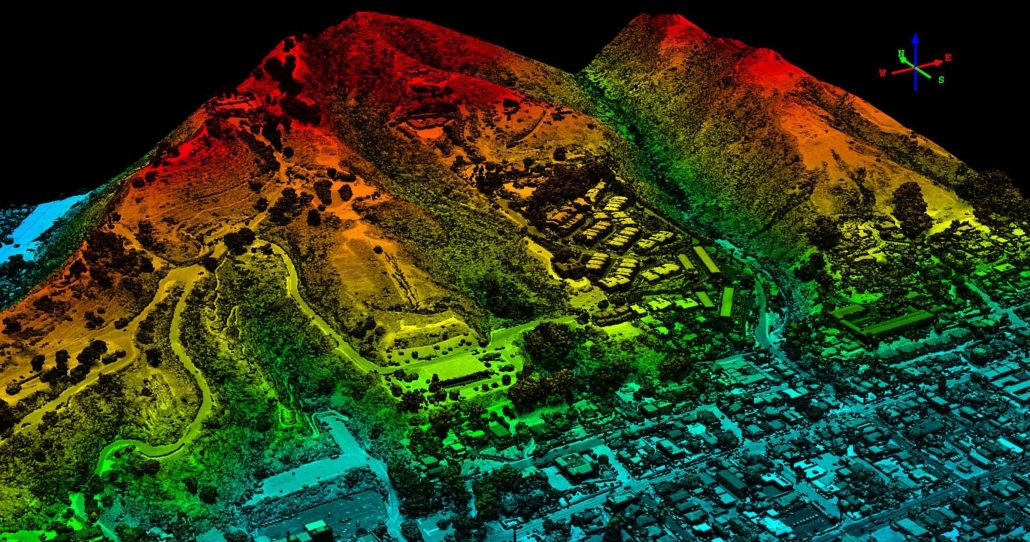
LiDAR dapat dengan cepat mengukur permukaan bumi dengan laju pengambilan sampel data lebih besar dari 150 kilohertz (150.000 pulsa per detik) [6]. LiDAR menghasilkan produk berupa kumpulan titik awan (points cloud) yang tergeoreferensi, sehingga menghasilkan representasi tiga dimensi (3D) dari permukaan bumi dan objek-objek diatasnya. Sistem LiDAR pada umumnya banyak beroperasi dengan menggunakan gelombang near infrared (NIR). Namun beberapa sensor pun ada yang menggunakan spektrum gelombang hijau untuk menembus air dan mendeteksi keadaan di dasar air.
LiDAR dapat memperoleh data di bawah kanopi pohon. Hal ini lah yang menjadi keunggulan LiDAR dibandingkan dengan fotogrametri dan pemetaan menggunakan citra satelit. Meskipun tidak semua data di bawah kanopi pohon dapat diperoleh, tetapi data tersebut dapat dijadikan sampel titik permukaan tanah di daerah yang berpohon tersebut. Hal ini karena LiDAR menggunakan sinar laser, sehingga selama masih ada celah cahaya yang bisa menembus ke bawah kanopi pohon, maka data LiDAR dapat diperoleh.
KOMPONEN LIDAR
Sistem LiDAR terdiri dari empat komponen dasar, yaitu sensor LiDAR, Global Positioning System (GPS), Inertial Measuring Unit (IMU), dan kamera digital [5]. Komponen-komponen tersebut akan dijelaskan dalam uraian berikut:
1. Sensor LiDAR
Sensor LiDAR berfungsi sebagai pemancar sinar laser ke objek dan merekam kembali setelah mengenai objek. Sensor laser memiliki beberapa karakteristik yang dapat dibedakan dari kekuatan sinar laser yang dipancarkan, cakupan dari pancaran sinar gelombang laser, dan jumlah sinar laser yang dihasilkan per detik. Salah satu karakteristik sensor laser LiDAR yang menjadi kelebihan LiDAR dibandingkan dengan yang lain adalah kemampuan gelombang tersebut untuk melakukan multiple return, yakni sensor LiDAR dapat merekam beberapa kali gelombang pantul dari objek yang ada dipermukaan bumi untuk setiap gelombang yang dipancarkan. Multiple return digunakan untuk menentukan bentuk dari objek atau vegetasi yang menutupi permukaan tanah. Gambar 1. menunjukkan ilustrasi dari multiple return. Gambar tersebut menunjukkan gelombang yang dipancarkan tidak hanya mengenai objek yang ada di atas permukaan tanah saja, tetapi juga mengenai permukaan tanah di bawah objek tersebut.
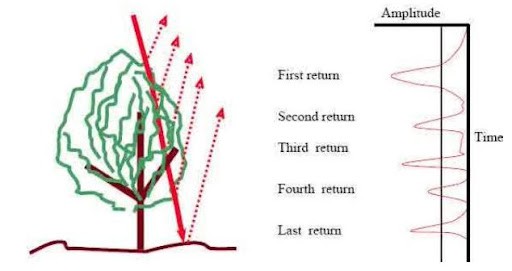
Sumber: Lohani, 2010
Permukaan objek yang pertama kali memantulkan pulsa laser akan menjadi gelombang pantul pertama (first return). Gelombang ini yang umumnya digunakan untuk membuat Digital Surface Model (DSM). Objek yang kedua kalinya memantulkan pulsa tersebut akan menjadi second return dan seterusnya hingga gelombang pantulan terakhir.
2. Global Positioning System (GPS)
Metode penentuan posisi GPS yang digunakan dalam sistem LiDAR adalah diferensial kinematik. Posisi wahana terbang selalu bergerak dan berubah-ubah dengan cepat ketika akuisisi data, maka dilakukan penentuan posisi GPS dengan metode kinematik untuk mendapatkan posisi dengan ketelitian yang tinggi. Pada Gambar 2. diilustrasikan konfigurasi antara base station dan rover, sehingga menghasilkan koordinat titik yang disimpan sebagai point cloud.
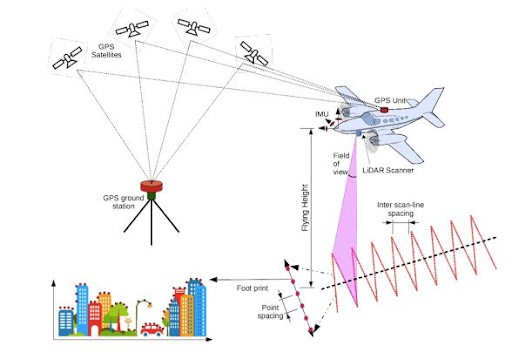
Sumber: Lohani dan Ghosh, 2017
Metode diferensial kinematik memerlukan dua buah receiver GPS. Satu receiver diletakkan pada sebuah titik yang telah diketahui koordinatnya di permukaan tanah yang berfungsi sebagai base (stasiun referensi), sedangkan receiver yang lain diletakkan pada wahana terbang sebagai roving receiver. Konfigurasi dari keduanya menghasilkan koreksi diferensial pada roving receiver, sehingga posisi laser pada wahana terbang dapat diketahui secara real time dan akurat [1]. Data GPS yang telah dihasilkan kemudian diolah secara post processing dan digabungkan dengan data Inertial Measuring Unit (IMU), sehingga diperoleh koordinat yang telah terdefinisi secara geografis
3. Inertial Measuring Unit (IMU)
Inertial Measuring Unit (IMU adalah salah satu komponen dalam sistem LiDAR. IMU berfungsi sebagai instrumen yang mendeteksi pergeseran rotasi dari wahana terbang terhadap sumbu-sumbu sistem terbang. Sistem tersebut dapat mengukur sudut perubahan berupa attitude wahana terbang (pitch, roll, dan yaw) terhadap sumbu-sumbu terbang. Selain itu, IMU juga dapat mendeteksi perubahan percepatan pada wahana pesawat terbang. Gambar 3. mengilutrasikan keadaan pitch, roll, dan yaw dari wahana terbang.
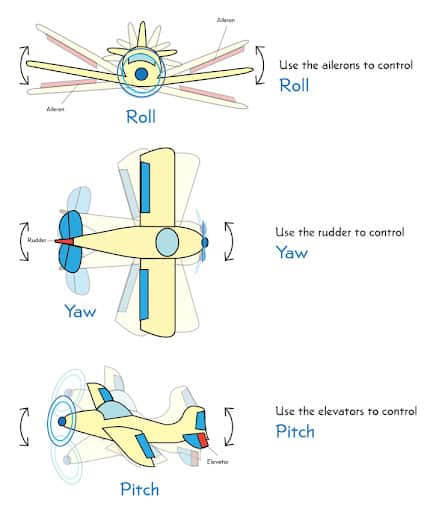
Sumber: https://www.researchgate.net/figure/Inertial-Measurement-Unit-2_fig1_262883017
Pitch adalah pergerakan rotasi sumbu y wahana terbang terhadap sumbu y sistem terbang. Sumbu y wahana terbang didefiniskan sebagai garis pada bidang horizontal yang tegak lurus sumbu x wahana terbang. Sumbu y sistem referensi terbang didefinisikan sebagai garis yang tegak lurus dengan arah terbang horizontal wahana.
Roll adalah pergerakan rotasi sumbu x wahana terbang terhadap sumbu x pada sistem referensi terbang. Sumbu x wahana terbang didefinisikan sebagai garis lurus pada bidang horizontal yang melalui bagian depan (hidung) wahana terbang hingga bagian belakang (ekor) wahana terbang. Garis ini membagi dua badan pesawat sama besar. Sumbu x dari sistem referensi terbang didefinisikan sebagai garis yang berimpit dengan arah terbang horizontal wahana.
Yaw adalah sudut antara sumbu z wahana terbang terhadap arah utara. Sumbu z wahana terbang didefinisikan sebagai garis yang tegak lurus terhadap sumbu x dan y wahana terbang [5].
IMU memantau attitude wahana terbang sehingga dapat dilakukan koreksi untuk setiap posisi objek pada saat akuisisi data. Tanpa informasi dari IMU posisi footprint dari sinar laser yang dipancarkan tidak dapat diketahui secara pasti.
4. Kamera Digital
Kamera dalam sistem LiDAR berfungsi untuk menghasilkan foto dari area pengukuran LiDAR. Foto tersebut dapat ditumpang tindihkan (overlay) dengan data X, Y, Z hasil pengukuran LiDAR. Informasi ini digunakan ketika operator melakukan post processing data LiDAR [13].
PRINSIP KERJA LIDAR
Secara umum prinsip kerja LiDAR adalah gelombang laser memancarkan pulsa dan memindai objek pada permukaan bumi, kemudian akan diukur waktu tempuh pulsa laser menuju suatu objek sampai kembali ke sensor. Hasil ukuran waktu tempuh tersebut dapat digunakan untuk menghitung jarak sensor ke objek. Setelah itu nilai jarak dan sudut pancaran akan dikoreksi menggunakan IMU untuk mendapatkan koreksi pergerakan wahana. Posisi tiga dimensi setiap titik yang direkam datanya akan didapatkan dari IMU yang diintegrasikan dengan GPS. GPS digunakan untuk terus mengatur ulang IMU agar mampu mendapatkan posisi dengan akurasi tinggi. Posisi GPS telah diikatkan pada sebuah stasiun pengamat, dan stasiun ini memberikan faktor koreksi bagi unit GPS yang terpasang di wahana. Ilustrasi prinsip kerja LiDAR ditunjukkan pada Gambar 4.
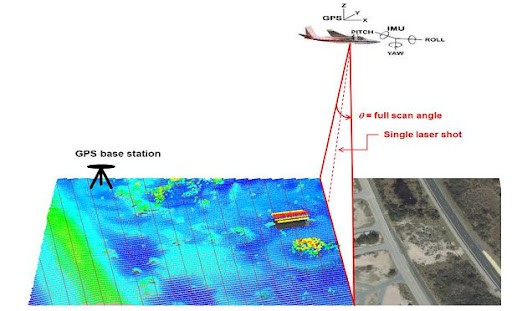
Sumber: Center, 2012
Perbedaan waktu ketika sinar laser dipancarkan dan ketika sinar laser diterima oleh receiver optis dikalkulasi oleh perangkat lunak khusus untuk memproses dan mengkonversi data tersebut menjadi jarak terukur [6]:
dimana:
D : jarak antara sensor dan objek yang diukur (m),
c : kecepatan cahaya (3×108 m/s),
t : waktu tempuh pulsa laser pada saat ditembakkan dari sensor dan diterima kembali oleh sensor (s).
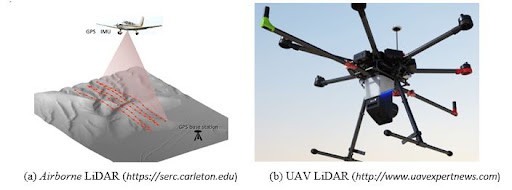
WAHANA LIDAR
Pada perkembangan awalnya, LiDAR dibawa oleh wahana pesawat udara atau disebut dengan Airborne LiDAR. Namun karena biaya sewa pesawat cukup mahal, maka dikembangkanlah wahana pesawat tanpa awak yang dapat membawa sensor LiDAR. Pesawat tanpa awak ini dikenal juga sebagai Unmanned Aerial Vehicle (UAV). Dimana wahana yang dimaksud dapat terbang sesuai dengan perencanaan terbang (autopilot) dan dapat melakukan pengambilan data LiDAR. UAV ini memungkinkan untuk melakukan pelacakan posisi dan orientasi dari sensor yang diimplementasikan dalam sistem lokal atau koordinat global [2].
OUTPUT LIDAR
Data yang dihasilkan dari akuisisi data LiDAR yaitu data dalam bentuk point cloud. Point cloud merupakan kumpulan titik yang mewakili bentuk atau fitur tiga dimensi (3D). Setiap titik memiliki koordinat X, Y, dan Z. Ketika terdapat banyak kumpulan point cloud yang disatukan, maka point cloud tersebut akan membentuk suatu permukaan atau objek dalam bentuk 3D.
Kerapatan titik (point cloud) yang bisa dihasilkan oleh LiDAR yaitu 1- 300 titik/?2, hal ini bergantung dari beberapa faktor, diantaranya adalah metode akuisi (tinggi terbang, jenis konfigurasi sensor, dan jenis permukaan), serta sudut pandang sensor ke permukaan bumi (field of view) [9]. Akurasi vertikal dari data LiDAR adalah kurang dari 20 cm dan untuk horizontalnya adalah 30-50 cm dalam range 15-24 cm dan horizontal 30-64 cm [6].Data point cloud dapat digunakan untuk membuat model tiga dimensi permukaan bumi (3D), seperti digital elevation model (DEM), digital surface model (DSM), dan normalized digital surface model (NDSM). Namun, sebelumnya point cloud harus diklasifikasikan menjadi ground point dan non-ground point terlebih dahulu. Ground point adalah point cloud yang membentuk permukaan bumi, tanpa objek-objek diatasnya seperti vegetasi, rumah, dll. Sedangkan non-ground point adalah point cloud yang membentuk objek-objek diatas permukaan bumi, seperti vegetasi, rumah, dll. Ground point ini akan digunakan untuk membuat DEM, sedangkan non-ground point akan digunakan untuk membentuk DSM dan NDSM. Selain itu, DEM yang dihasilkan pun dapat digunakan lagi untuk membuat garis kontur.
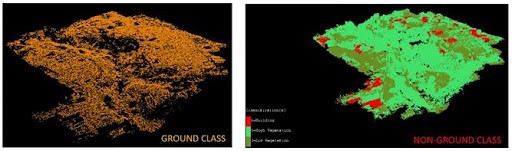
Sumber: Hasil Olahan PT Kreasi Handal Selaras. 2019
Digital Elevation Model (DEM) merupakan penyajian persebaran titik diskrit yang merepresentasikan distribusi spatial elevation permukaan yang berubah-ubah dengan referensi datum tertentu [12]. DEM menyajikan permukaan bumi tanpa menampilkan fitur vegetasi, bangunan, dan struktur buatan manusia yang lainnya.
Digital Surface Model (DSM) adalah model permukaan bumi yang meluputi fitur alami maupun buatan manusia, misalnya gedung, vegetasi, dan pepohonan [3]. DSM juga merupakan model elevasi topografis permukaan bumi yang memberi batas acuan yang benar secara geometris. DSM menggambarkan puncak fitur yang terdapat di atas bare earth.
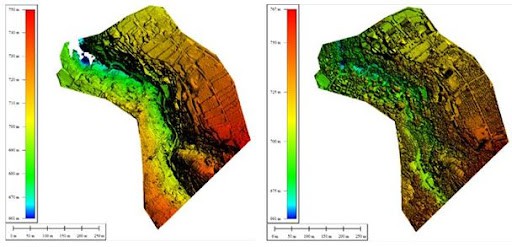
Sumber: Hasil Olahan PT Kreasi Handal Selaras. 2019
Normalized Digital Surface Model (NDSM) adalah penyajian model elevasi objek pada permukaan datar. Model ini diperoleh dari perbedaan antara DSM dan DEM. NDSM dihitung dengan cara mengurangkan DSM dengan DEM [8]. Penghitungan ini akan didapatkan tinggi objek yang ada di atas permukaan tanah.
Garis kontur adalah garis khayal pada peta yang meghubungkan titik-titik dengan ketinggian yang sama. Garis kontur disajikan di atas peta untuk memperlihatkan naik turunnya keadaan permukaan tanah, juga untuk memberikan informasi slope (kemiringan tanah), irisan profil memanjam permukaan tanah terhadap jalur proyek, dan perhitungan galian serta timbunan (cut and fill) permukaan tanah.
APLIKASI LIDAR
Teknologi LiDAR yang menghasilkan output dengan akurasi data yang cukup akurat, menjadikan teknologi ini mulai banyak digunakan. Berikut adalah aplikasi LiDAR dalam beberapa bidang:
- Pemodelan Banjir
Dalam pemodelan banjir, LiDAR berperan dalam membentuk digital elevation model (DEM). DEM yang dihasilkan dari LiDAR memiliki kualitas data dan resolusi spasial yang lebih baik dibandingkan dengan citra satelit. DEM ini berfungsi untuk membentuk model geometri sungai yang akan digunakan pada tahapan simulasi banjir [4].
- Pemantauan Tanah Longsor
Pada pemantauan tanah longsor, pengambilan data LiDAR dilakukan secara berkala dalam selang waktu tertentu. Pergerakan tanah dapat dipantau dari perubahan data yang didapatkan. Pemantauan tanah longsor menggunakan LiDAR akan menghasilkan model tiga dimensi dari lereng yang diamati.
- Pemetaan Kawasan Hutan
Sinar laser yang dipancarkan oleh LiDAR dapat menembus celah-celah kecil pada kanopi pohon. Hal ini menjadikan LiDAR dapat merekam data di bawah kanopi pohon. Sehingga, dengan menggunakan LiDAR dapat dihasilkan DEM pada kawasan hutan. DEM dalam pemetaan kawasan hutan digunakan untuk menentukan zonasi bahaya kebakaran hutan.
- Survei Pertambangan
Pada survei pertambangan LiDAR digunakan untuk memantau kemiringan lereng, menghitung volum stock pile, dan melakukan cut and fill.
Jadi, sangat menarik bukan teknologi LiDAR ini? Menurut Anda, dapat diaplikasikan untuk apa lagi teknologi LiDAR ini?
DAFTAR REFERENSI
[1] Abidin, H. Z. 2000. Penentuan Posisi Dengan GPS dan Aplikasinya. Jakarta : Pradnya Paramita.
[2] Airborne LiDAR. https://serc.carleton.edu/details/images/83475.html, diakses pada tanggal 31 Oktober 2019.
[3] ASPRS, 2007, Digital Elevation Model Technologies and Applications: The DEM Users Manual, 2nd Edition, edited by David F. Maune, Bethesdha, Maryland.
[4] Asriyah, Nur., Budi Harto, Agung., dan Wikantika, Ketut. 2017. Pemanfaatan Teknologi Light Detection and Ranging (LiDAR) Dalam Pemodelan Banjir Akibat Luapan Air Sungai, Bunga Rampai Forum Peneliti Muda Indonesia. Bandung : Istitut Teknologi Bandung.
[5] Burtch, Robert. 2001. LiDAR Principles and Applications. Big Rapids.
[6,1] Center, N. C. (2012). Lidar 101: An Introduction to Lidar Technology, Data, and Applications. Charleston: SC: NOAA Coastal Services Center.
[7,2] Eisenbeiß, H., Zurich, E. T. H., Eisenbeiß, H., & Zürich, E. T. H. (2009). UAV photogrammetry. Institute of Photogrammetry and Remote Sensing.
[8] Grigillo, D., Kosmatin Fras, M., dan Petrovič, D. 2011. Automatic Extraction and Building Change Detection from Digital Surface Model and Multispectral Orthophoto, Geodetski vestnik, 55(1), 28-45.
[9,3] Kandia, P. (2012). Pembentukan Model untuk Estimasi Kelapa Sawit Menggunakan Data Light Detection and Ranging (LIDAR). Bandung: Institut Teknologi Bandung.
[10] Lohani, Bharat dan Ghosh, Suddhasheel. 2017. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proceedings of the National Academy of Sciences. India.
[11] Lohani, B., 2010, Multiple return LiDAR, http://home.iitk.ac.in/~blohani/ (diakses pada tanggal 31 Oktober 2019).
[12] Meijerink, A. M. J., dkk., 1994, Introduction to The Use of Geographic Information Systems for Practical Hydrology, International Institute for Aerospace Survey and Earth Sciences (ITC). Enschede.
[13] Moskal, L. Monika. 2008. LiDAR Fundamentals: Part One, Workshop on Site-scale Application of LiDAR on Forest Lands in Washington, Center for Urban Holticulture. University of Washington.
[14] Pitch, Roll, and Yaw. https://howthingsfly.si.edu/flight-dynamics/roll-pitch-and-yaw, diakses pada tanggal 31 Oktober 2019.
[15] UAV LiDAR. http://www.uavexpertnews.com/2019/04/nextcore-releases-nextcore-rn-series/, diakses pada tanggal 31 Oktober 2019.
 PT. KHS
PT. KHS  PT.KHS
PT.KHS  PT KHS
PT KHS  KHS
KHS  PT. KHS
PT. KHS  PT.KHS
PT.KHS  PT KHS
PT KHS 

Leave a Reply
Want to join the discussion?Feel free to contribute!