Pembangunan infrastruktur jalan yang ada di Indonesia akhir-akhir ini semakin banyak dilakukan karena masalah kemacetan dan kebutuhan akan peningkatan ekonomi yang semakin meningkat. Makin tinggi arus lalu lintas, semakin besar dimensi yang diperlukan. (Koloway 2009 dalam Dhia Kamal Irfan dkk 2020) Dengan adanya pengembangan dan pembangunan jalan secara terus-menerus, diperlukan pengawasan jalan untuk memastikan kondisi jalan tetap dalam keadaan baik.
Pengawasan jalan merupakan sebuah kegiatan yang dilakukan untuk mewujudkan tertib pengaturan, pembinaan, dan pembangunan jalan sesuai dengan Undang-undang Nomor 38 Tahun 2004 Tentang Jalan. Pengawasan Jalan harus dilakukan secara teratur untuk memastikan bahwa kondisi jalan tetap terjaga, sehingga dapat meminimalkan risiko terjadinya kecelakaan, kemacetan serta melakukan pengawasan dan perbaikan kondisi jalan yang sudah rusak.
Pengawasan jalan dapat dilakukan dengan berbagai cara, baik secara manual, survei langsung ke lapangan, maupun menggunakan berbagai teknologi masa kini. Seperti yang telah dilakukan oleh Polisi Daerah Jawa Tengah seperti yang Dilansir dari kontan.co.id, beberapa waktu lalu mereka telah melakukan uji coba tilang menggunakan teknologi drone. Adapun manfaat lainnya dari penggunaan teknologi drone yang berkaitan dengan pengawasan jalan adalah sebagai berikut:
Pengawasan Titik Kemacetan
Drone dapat lebih efektif dalam pengawasan lalu lintas yang dapat menjangkau wilayah lebih luas. Pengawasan lalu lintas biasanya dilakukan dengan menggunakan kamera statis yang ditempatkan di sudut jalan dan kamera ponsel yang dioperasikan oleh anggota secara mobile. Saat ini penggunaan drone menjadi salah satu alternatif pengawasan lalu lintas. Metodenya adalah dengan menyebar beberapa drone di titik-titik kemacetan sehingga petugas penanganan akan langsung dikerahkan ke titik macet tersebut.
Tilang Elektronik
Saat ini kepolisian dalam melakukan kegiatan tilang elektronik telah melakukan uji coba penggunaan teknologi drone. Penggunaan drone ini memiliki sejumlah kelebihan yaitu 1. Memantau jenis pelanggaran orang yang melawan arus lalu lintas. Pada pelanggaran ini, drone bisa melihat lebih jelas pelanggaran yang terjadi karena memantau secara keseluruhan dari ketinggian yang cukup untuk melihat satu kawasan. 2. Pelanggaran terkait penggunaan sabuk pengaman (seat belt) Karena kamera drone dapat menangkap dengan jelas pelanggar yang tidak mengenakan seatbelt. Selain itu penggunaan drone untuk pengawasan pelanggaran lalu lintas ini juga memiliki keunggulan terkait jarak pantaunya. Di mana jarak pantau drone bisa mencapai 1 kilometer.
Perawatan Jalan
Pada proses perawatan jalan, drone dapat membantu menghasilkan data foto udara, di mana secara lebih jelas dapat diketahui data titik kerusakan jalan dan tingkat kerusakan jalannya. Dengan menggunakan drone, pengambilan keputusan akan jauh lebih cepat, dan penanganannya dapat segera ditindaklanjuti.
Evaluasi Geometri Jalan
Berdasarkan penelitian Evaluasi Geometri Jalan Menggunakan UAV Dengan Aplikasi Agisoft Photoscanner Pada Jalan Meranti Kampus IPB Dramaga yang dilakukan oleh Dhia Kamal Irfan. dkk. tahun 2020, dengan penggunaan drone, pekerjaan evaluasi geometri jalan dapat dilakukan. Caranya adalah dengan pemanfaatan data foto udara, lebar jalan, dan koordinat serta elevasi dari titik kontrol tanah (Ground Control Point). Dengan informasi data DEM (Digital Elevation Model) dari LiDAR tersebut akan dicari perbedaan kesamaan elevasinya dengan kondisi eksisting jalan.
Dengan perkembangan teknologi saat ini, semua industri mulai mengembangkan penggunaan teknologi-teknologi terbaru untuk membuat pekerjaan lebih efektif dan efisien. Pengawasan jalan menggunakan teknologi drone, dapat membuat pekerjaan lebih cepat selesai dengan hasil data yang jauh lebih akurat.
Sumber:
Dhia Kamal Irfan. dkk. 2020. Evaluasi Geometri Jalan Menggunakan UAV Dengan Aplikasi Agisoft Photoscanner Pada Jalan Meranti Kampus IPB Dramaga. Jurnal Teknik Sipil dan Lingkungan Institut Pertanian Bogor. Vol. 05 No. 02, Agustus 2020. DOI: 10.29244/jsil.5.2.101-114
Muhammad Fadli. 2023. Uji Coba Tilang Elektronik Pakai Drone: 10 Menit Jaring 9 Pengendara. https://www.asumsi.co/post/76778/uji-coba-tilang-elektronik-pakai-drone-10-menit-jaring-9-pengendara/.
Barratut Taqiyyah Rafie. 2022. Ini Jenis Pelanggaran Tilang yang Dipantau dengan Drone, Pengemudi Harus Tahu. https://regional.kontan.co.id/news/ini-jenis-pelanggaran-tilang-yang-dipantau-dengan-drone-pengemudi-harus-tahu. Diakses 10 April 2022.
https://www.handalselaras.com/wp-content/uploads/2023/04/Blue-Orange-Digital-Marketing-Facebook-Cover-Poster-Portrait-Banner-Landscape-1.png34566912adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2023-04-11 07:49:592023-04-11 13:46:31Penggunaan Drone Dalam Pengawasan Jalan
Kemajuan teknologi yang sangat pesat terutama UAV dalam beberapa tahun terakhir membuat banyak inovasi terkini dalam upaya manajemen bencana di Indonesia. Dengan teknologi UAV, yang relatif lebih terjangkau dan mudah digunakan diharapkan mampu membantu dalam kajian manajemen bencana khususnya pada saat pasca bencana. Dalam artikel ini, anda akan mengetahui mengenai pemanfaatan UAV pada saat pasca bencana, alasan mengapa UAV lebih sering digunakan, dan manfaat penggunaannya. Yuk disimak! semoga dapat bermanfaat.
Teknologi UAV Untuk Kebencanaan
Sumber: PT.KHS
UAV (Unmanned Aerial Vehicle) atau yang lebih dikenal dengan drone merupakan alat yang efektif untuk melakukan pemetaan foto udara. Saat ini, penggunaan UAV meningkat karena keuntungan pada biaya yang relatif murah. UAV dapat dimanfaatkan untuk kegiatan inspeksi, pengawasan, pengintaian, dan pemetaan. Teknologi komputer dan teknologi pengolahan gambar digital telah dikembangkan dan pengembangan ini dapat menyediakan hingga melakukan proses ekstraksi baik secara otomatis atau semi-otomatis (Solikhin, 2016).
Bencana alam maupun bencana yang disebabkan oleh manusia yang terjadi akan meninggalkan kehancuran pada lingkungan terdampak dan sekitarnya. Kondisi area terdampak bencana cenderung sulit diakses oleh petugas tanggap bencana. Sementara banyak hal yang harus segera dilakukan oleh petugas tersebut, seperti menyisir seluruh area, memetakan wilayah dan jalur alternatif, serta mendistribusikan berbagai bantuan untuk korban. Pekerjaan tersebut terkadang sangat sulit dilakukan apalagi jika area terdampak bencananya tergolong sangat luas. Oleh karena itu, hadirlah UAV yang mengambil alih pekerjaan tersebut sehingga mempercepat penanganan pasca bencana.
Pada saat keadaan pasca bencana, sulit untuk mengetahui informasi penting baik dikarenakan medan yang sulit ditempuh, keadaan yang tidak terkendali, sampai keadaan panik akibat korban luka dan korban jiwa. Dalam kondisi kurang terkendali tersebut, dibutuhkan data dan informasi yang cepat dan tepat untuk dapat membantu korban bencana. Data-data yang dibutuhkan adalah:
Kondisi umum area bencana
Mengidentifikasi zona aman dan bahaya
Peta detail dan akurat
Data banyaknya korban terdampak
Informasi infrastruktur yang rusak.
Mengapa Memilih Menggunakan UAV?
Terdapat beberapa keuntungan dalam penggunaan UAV pada saat pasca bencana:
Kecepatan dan ketinggian dapat diatur sesuai dengan kebutuhan.
Menghasilkan data dengan resolusi sangat tinggi, dan hanya kemungkinan kecil tertutup awan (apabila terbang sangat tinggi) jika dibandingkan dengan satelit.
Pengoperasian secara otomatis atau manual.
Dapat menggunakan berbagai sensor sesuai dengan kebutuhan.
Biaya yang dibutuhkan relatif lebih kecil.
Dapat menjangkau daerah yang luas dan daerah yang sulit.
Lebih fleksibel, efektif, dan efesien dalam melakukan survei. Saat melakukan kaji cepat tidak perlu memasuki kawasan rawan bencana yang membahayakan jiwa petugas.
Mampu memberikan informasi berupa gambar dan video yang dapat mendukung laporan.
Data yang diperoleh dapat digunakan ke dalam peta sebagai sarana pendukung dalam penyusunan rencana operasi pada masa tanggap darurat agar lebih efektif.
Melakukan assesmen lebih cepat.
Adapun tujuan penggunaan UAV salah satunya adalah menghasilkan citra orthophoto dan Digital Elevation Model (DEM) resolusi tinggi yang diharapkan mampu memberikan gambaran dan data teknis bencana secara cepat dan akurat.
Citra Orthophoto
Sumber: PT. KHS
Beberapa Fungsi UAV Pada Saat Pasca Bencana
Penyisiran Wilayah dan Penyelamatan
Drone sebagai pesawat tanpa awak yang dilengkapi kamera dimanfaatkan untuk melakukan penyisiran wilayah terdampak bencana yang luas. Drone dapat melakukan penyisiran dengan lebih cepat karena kemampuan terbangnya yang stabil di segala keadaan. Saat menyisir wilayah, drone juga akan sekaligus menandai lokasi korban serta mengidentifikasi bagian wilayah yang paling gawat kondisinya. Sehingga selanjutnya upaya penyelamatan dapat segera dilakukan dengan lebih terfokus dan cepat.
Pemantauan Keselamatan Petugas
Seperti sudah disebutkan sebelumnya, bencana akan mengakibatkan sarana infrastruktur mengalami gangguan dan kerusakan. Keadaan lingkungan terdampak bencana sangat tidak stabil, kerap terdapat bangunan yang beresiko runtuh tiba-tiba, pepohonan yang akarnya sudah tidak kuat, kabel listrik yang putus, atau genangan banjir yang tidak terukur.
Kondisi-kondisi tersebut bisa saja mencelakai petugas tanggap bencana dan menambah korban lagi. Di sinilah drone berperan memberikan pemantauan jarak jauh untuk meningkatkan keselamatan petugas dan orang-orang di sekitar. Hasil pemantauan drone akan dijadikan acuan petugas untuk menentukan cara terbaik mendekati wilayah bencana.
Menilai Kerugian Aset
Dalam sebuah bencana, petugas biasanya memiliki dua tugas penting yaitu evakuasi korban manusia dan assessment aset terdampak. Assessment adalah proses penilaian kerugian aset berdasarkan kerusakan yang terjadi pada fasilitas publik. Penilaian ini diperlukan agar pemerintah dapat dengan segera menganggarkan dana untuk memulihkan wilayah tersebut.
Drone membantu pekerjaan tersebut dengan menganalisa wilayah bencana yang luas untuk kemudian mengidentifikasi area atau infrastruktur yang kondisinya parah dan membutuhkan penanganan segera. Drone menampilkan data tersebut dalam bentuk foto
Pemetaan 3D Area Bencana
Untuk mempercepat proses evakuasi dan distribusi bantuan ke wilayah darurat, peta 3D atau pencitraan visual sangat dibutuhkan. Pesawat besar dengan awak bisa melakukan pemetaan ini, namun biayanya terlalu mahal. Sedangkan pencitraan satelit memiliki resolusi gambar yang kurang bagus. Keduanya sama-sama membutuhkan waktu lama untuk memetakan lokasi, sehingga drone adalah pilihan yang paling tepat untuk situasi ini.
Drone secara cepat dapat menghasilkan pemetaan 3D dengan resolusi yang tinggi sehingga tiap titik kerusakan dapat diidentifikasi. Data tersebut akan otomatis diunggah secara real-time. Drone menghasilkan peta dengan model 3D dengan bantuan sofware khusus pengolah gambar yang terhubung dengannya. Pemetaan 3D drone ini sudah pernah diaplikasikan dalam penanggulangan pasca gempa Nepal pada tahun 2015 lalu.
Sumber: PT. KHS
Dalam sistem manajemen bencana, Penanganan pasca bencana merupakan salah satu kunci untuk dapat secara cepat dan tepat menangani korban dan dampak dari bencana yang telah berlangsung. Dengan penanganan yang tepat dan cepat akan dapat membantu pemerintah dalam melakukan kajian penanganan bencana baik berupa pemberian bantuan, penyisiran wilayah, ataupun pemantauan korban jiwa. Dengan teknologi UAV, hal tersebut dapat dilakukan dengan cepat. Diharapkan penanganan bencana di seluruh wilayah Indonesia dapat terorganisir dengan baik dan seluruh elemen masyarakat serta pemerintah dapat bersiap siaga dalam menghadapi bencana termasuk dalam mitigasi bencana.
REFERENSI
Allawiyah, Mutia. 2022. Drone: Pesawat Terbang Tanpa Awak Untuk Kebencanaan. https://siagabencana.com/all/post/drone-pesawat-terbang-tanpa-awak-untuk-kebencanaan. Diakses pada 28 November 2022.
2016. BNPB Akan Manfaatkan Drone Untuk Penanggulangan Bencana https://mediaindonesia.com/humaniora/70670/bnpb-akan-manfaatkan-drone-untuk-penanggulangan-bencanaDrone. Diakses pada 28 November 2022.
Fibriati, Romana Dwi. 2020. 5 Peran Penting Drone dalam Penanggulangan Bencana https://www.builder.id/drone-penanggulangan-bencana/. Diakses pada 28 November 2022.
Kristiawan, Yohandi. dkk. 2017. Aplikasi UAV Drone Untuk Penanggulangan Cepat Potensi Aliran Bahan Rombakan (Banjir Bandang) Studi Kasus Di Desa Lebakwangi, Kecamatan Arjasari, Kabupaten Bandung. Prosiding, Seminar Nasional Kebumian. Pusat Vulkanologi Dan Mitigasi Bencana Geologi.
Nugroho Wisnu, 2019. Pemanfaatan Drone untuk Membantu Pemulihan Gempa dan Tsunami di Palu. https://infokomputer.grid.id/read/121712212/pemanfaatan-drone-untuk-membantu-pemulihan-gempa-dan-tsunami-di-palu Diakses pada 28 November 2022.
Ramadhani, Yoniar Hufan. 2016. Pemanfaatan UAV Untuk Pemetaan Tematik Kebencanaan. Seminar Pemanfaatan UAV Untuk Penanggulan Bencana. Badan Informasi Geospasial.
Setyorini, Virna, P. 2020. Penggunaan Drone Untuk Kebencanaan Libatkan Swasta Dan Komunitas. https://www.antaranews.com/berita/1753473/penggunaan-drone-untuk-kebencanaan-libatkan-swasta-dan-komunitas. Diakses pada 28 November 2022.
Zona Spasial. 2018. 4 Fungsi Drone dalam Penanganan Pasca Bencana. https://zonaspasial.com/tag/foto-udara/. Diakses pada 28 November 2022.
https://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.png00adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2022-12-12 09:59:582022-12-12 11:27:06Teknologi UAV Untuk Penanganan Pasca Bencana
Oleh : Tike Aprillia, S.T dan Rabby Awalludin, S.T
LiDAR atau juga dikenal sebagai LADAR adalah akronim untuk light detection and ranging. LiDAR adalah teknologi yang menerapkan sistem penginderaan jauh sensor aktif untuk menentukan jarak dengan menembakkan sinar laser yang dipasang pada wahana pesawat. Jarak didapatkan dengan menghitung waktu antara ditembakkannya sinar laser dari sensor sampai diterima kembali oleh sensor.
Teknologi light detection and ranging (LiDAR) saat ini telah banyak dikembangkan. Output LiDAR berupa data tiga dimensi (3D) dengan akurasi yang cukup tinggi dan pengambilan data yang lebih cepat menjadikan teknologi ini mulai banyak diaplikasikan dalam berbagai bidang. Sehingga, teknologi ini dapat digunakan sebagai alternatif dari teknologi pemetaan secara konvensional (pemetaan terestris).
Pada area pengukuran yang luas, LiDAR akan sangat efisien digunakan dibandingkan dengan metode pemetaan konvensional. Hal ini karena waktu pengambilan dan pemrosesan data dapat dilakukan lebih cepat. Selain itu output LiDAR sudah dalam bentuk digital, sehingga tidak perlu dilakukan proses digitalisasi.
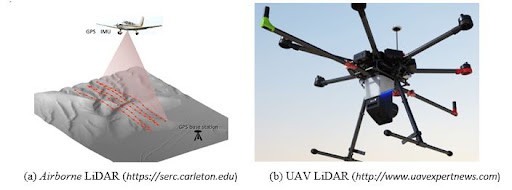
Pada perkembangan awalnya, LiDAR dibawa oleh wahana pesawat udara atau disebut dengan Airborne LiDAR. Namun karena biaya sewa pesawat cukup mahal, maka dikembangkanlah wahana pesawat tanpa awak yang dapat membawa sensor LiDAR. Pesawat tanpa awak ini dikenal juga sebagai Unmanned Aerial Vehicle (UAV). Dimana wahana yang dimaksud dapat terbang sesuai dengan perencanaan terbang (autopilot) dan dapat melakukan pengambilan data LiDAR. Berikut beberapa contoh UAV dan sensor yang digunakan untuk survei LiDAR:
Gambar 1. Sensor LiAir 220Gambar 2. Lidar Livox dengan DJI Matrice 300 RTK
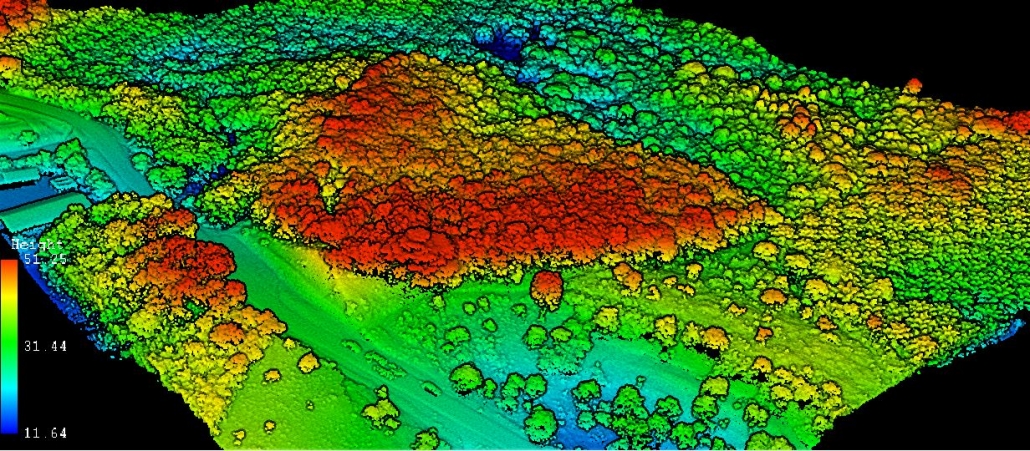
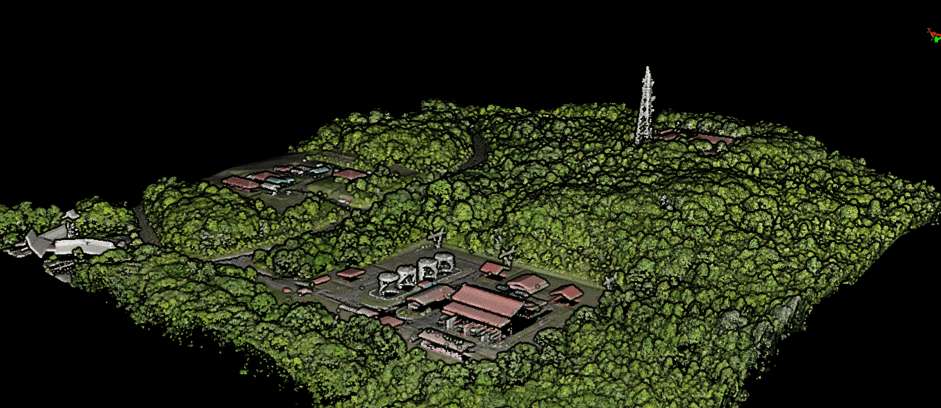
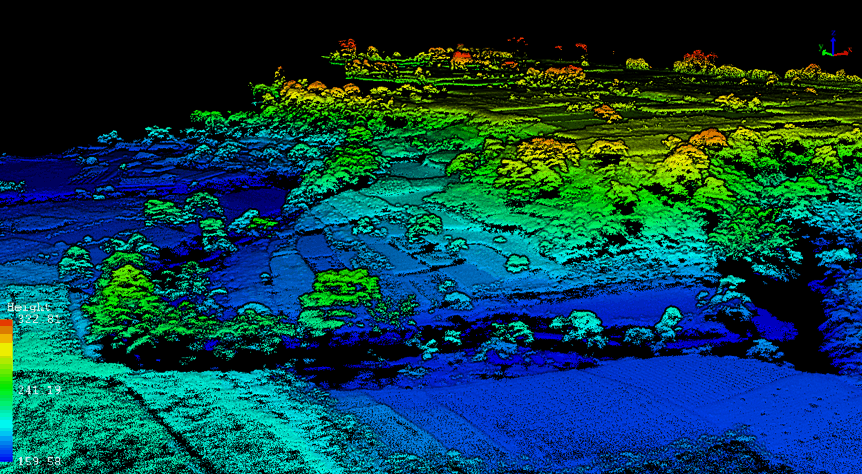
Data yang dihasilkan dari akuisisi data LiDAR yaitu data dalam bentuk point cloud. Point cloud merupakan kumpulan titik yang mewakili bentuk atau fitur tiga dimensi (3D). Setiap titik memiliki koordinat X, Y, dan Z. Ketika terdapat banyak kumpulan point cloud yang disatukan, maka point cloud tersebut akan membentuk suatu permukaan atau objek dalam bentuk 3D. Sehingga topografi dari area yang disurvei dapat langsung terlihat.
Gambar 3. Point Cloud Tergeoreferensi
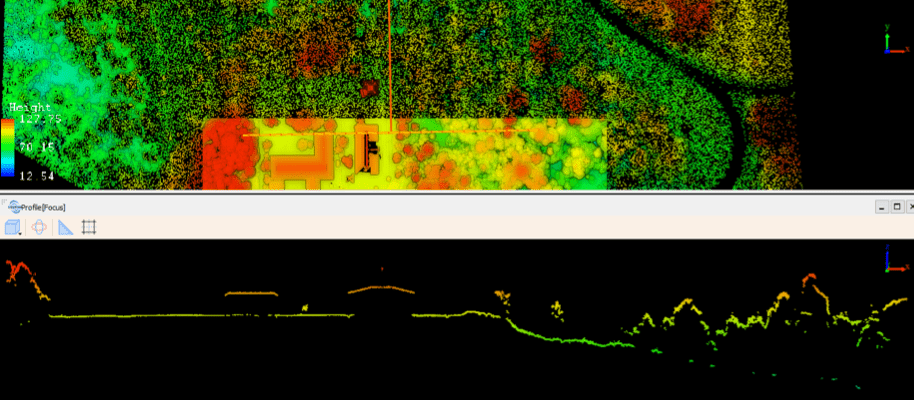
LiDAR dapat memperoleh data di bawah kanopi pohon. Hal ini lah yang menjadi keunggulan LiDAR dibandingkan dengan fotogrametri dan pemetaan menggunakan citra satelit. Meskipun tidak semua data di bawah kanopi pohon dapat diperoleh, tetapi data tersebut dapat dijadikan sampel titik permukaan tanah di daerah yang berpohon tersebut. Hal ini karena LiDAR menggunakan sinar laser, sehingga selama masih ada celah cahaya yang bisa menembus ke bawah kanopi pohon, maka data LiDAR dapat diperoleh.
Gambar 4. Data ground dibawah pohon rimbun yang terambil oleh LiDAR.
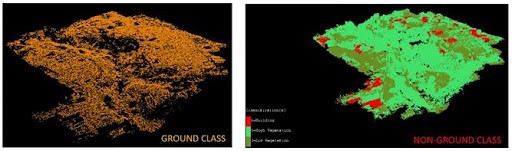
Data point cloud dapat digunakan untuk membuat model tiga dimensi permukaan bumi (3D), seperti digital terrain model (DTM), digital surface model (DSM), dan normalized digital surface model (NDSM). Namun, sebelumnya point cloud harus diklasifikasikan menjadi ground point dan non-ground point terlebih dahulu. Ground point adalah point cloud yang membentuk permukaan bumi, tanpa objek-objek diatasnya seperti vegetasi, rumah, dll. Sedangkan non-ground point adalah point cloud yang membentuk objek-objek diatas permukaan bumi, seperti vegetasi, rumah, dll. Ground point ini akan digunakan untuk membuat DTM, sedangkan non-ground point akan digunakan untuk membentuk DSM dan NDSM. Selain itu, DEM yang dihasilkan pun dapat digunakan lagi untuk membuat garis kontur.
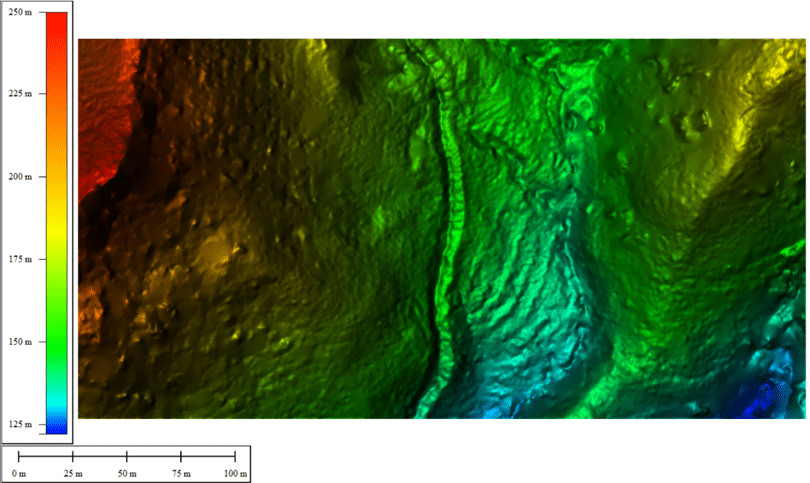
Digital Terrain Model (DTM) merupakan penyajian persebaran titik diskrit yang merepresentasikan distribusi spatial elevation permukaan yang berubah-ubah dengan referensi datum tertentu. DTM menyajikan permukaan bumi tanpa menampilkan fitur vegetasi, bangunan, dan struktur buatan manusia yang lainnya.
Gambar 5. Digital Terrain Model (DTM).
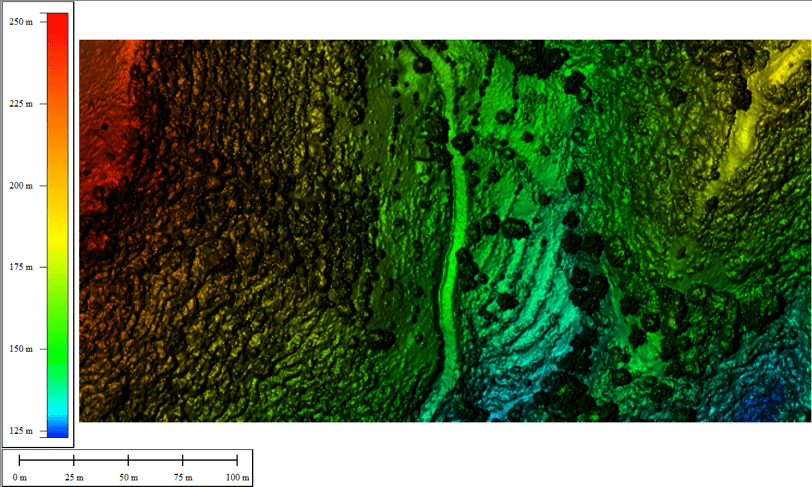
Digital Surface Model (DSM) adalah model permukaan bumi yang meluputi fitur alami maupun buatan manusia, misalnya gedung, vegetasi, dan pepohonan. DSM juga merupakan model elevasi topografis permukaan bumi yang memberi batas acuan yang benar secara geometris. DSM menggambarkan puncak fitur yang terdapat di atas bare earth.
Gambar 6. Digital Surface Model.
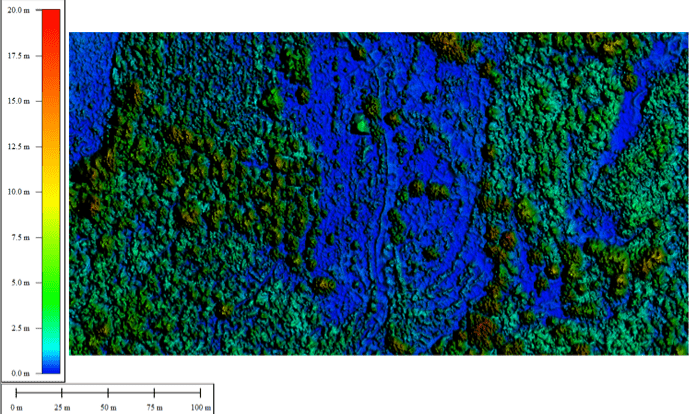
Normalized Digital Surface Model (NDSM) adalah penyajian model elevasi objek pada permukaan datar. Model ini diperoleh dari perbedaan antara DSM dan DEM. NDSM dihitung dengan cara mengurangkan DSM dengan DEM. Penghitungan ini akan didapatkan tinggi objek yang ada di atas permukaan tanah.
Gambar 7. Normalized Digital Surface Model (NDSM).
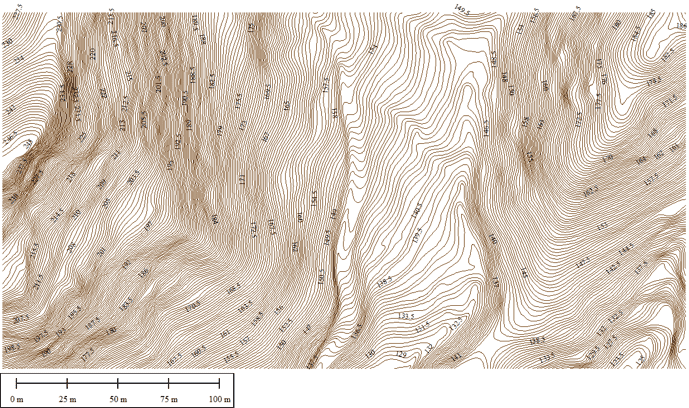
Garis kontur adalah garis khayal pada peta yang meghubungkan titik-titik dengan ketinggian yang sama. Garis kontur disajikan di atas peta untuk memperlihatkan naik turunnya keadaan permukaan tanah, juga untuk memberikan informasi slope (kemiringan tanah), irisan profil memanjam permukaan tanah terhadap jalur proyek, dan perhitungan galian serta timbunan (cut and fill) permukaan tanah.
Gambar 8. Garis Kontur 0.5 m.
Teknologi LiDAR yang menghasilkan output dengan akurasi data yang cukup akurat dan presisi, menjadikan teknologi ini mulai banyak digunakan. Berikut adalah aplikasi LiDAR dalam beberapa bidang:
Pemodelan Banjir
Dalam pemodelan banjir, LiDAR berperan dalam membentuk digital terrain model (DTM). DTM yang dihasilkan dari LiDAR memiliki kualitas data dan resolusi spasial yang lebih baik dibandingkan dengan citra satelit. DTM ini berfungsi untuk membentuk model geometri sungai yang akan digunakan pada tahapan simulasi banjir.
Mitigasi dan Pemantauan Tanah Longsor
Pada pemantauan tanah longsor, pengambilan data LiDAR dilakukan secara berkala dalam selang waktu tertentu. Pergerakan tanah dapat dipantau dari perubahan data yang didapatkan. Pemantauan tanah longsor menggunakan LiDAR akan menghasilkan model tiga dimensi dari lereng yang diamati.
Pemetaan Kawasan Hutan
Sinar laser yang dipancarkan oleh LiDAR dapat menembus celah-celah kecil pada kanopi pohon. Hal ini menjadikan LiDAR dapat merekam data di bawah kanopi pohon. Sehingga, dengan menggunakan LiDAR dapat dihasilkan DEM pada kawasan hutan. DEM dalam pemetaan kawasan hutan digunakan untuk menentukan zonasi bahaya kebakaran hutan.
Survei Pertambangan
Pada survei pertambangan LiDAR digunakan untuk memantau kemiringan lereng, menghitung volum stock pile, dan melakukan cut and fill.
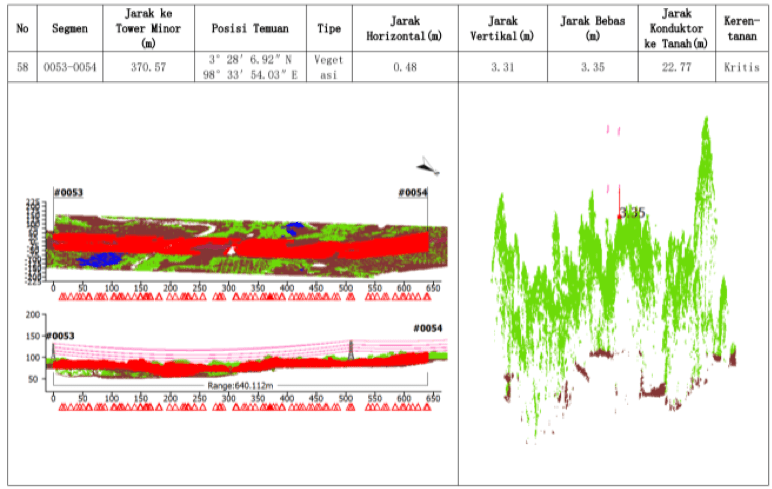
Deteksi Bahaya Pada Jalur Transmisi Listrik
Output LiDAR yang dapat dikembangkan untuk kepentingan PLN yaitu point cloud tergeoreferensi, DTM, dan kontur. Point cloud dapat digunakan untuk analisis bahaya objek-objek pada jalur di sekitar kabel listrik dan SUTET atau SUTT. DTM dan kontur dapat digunakan untuk perencanaan desain pembuatan jalur listrik.
Gambar 9. Rincian Detail Dari Daftar Indikasi Bahaya (Kritis) Hasil Analisis.
Perencanaan Pembangunan Perumahan.
Data Lidar dapat memberikan data kontur sampai dengan 1:1.000 atau rentan 0,5m. Perencanaan “cut and fill” dapat di rencanakan dengan baik sehingga biaya untuk pematangan lahan bisa di optimalkan dari aset tanah yang ada. Perencanaan untuk infrastruktur kawasan seperti jalan dan drainase juga bisa bersamaan dilakukan. Selain itu DTM hasil dari data LiDAR dapat digunakan untuk analisis hidrologi di area perumahan yang dibangun.
Pemetaan Geohazard
DTM hasil dari pengolahan data LiDAR dapat digunakan untuk mengetahui besar kemiringan lereng (slope) dan arah pergerakan lereng (aspect). Data slope dan aspect selanjutnya dapat digunakan untuk analisis arah pergerakan tanah.
Inventarisasi Pohon
Inventarisasi pohon dapat dilakukan dengan survei lidar dengan kondisi area yang disurvei memiliki pohon dengan jenis, umur, dan jarak antar pohon yang sama. Analisis ini menggunakan point cloud dan data NDSM dari output LiDAR. Hasil analisis yang didapatkan yaitu jumlah, tinggi, dan diameter crown pohon.
https://www.handalselaras.com/wp-content/uploads/2022/09/20220829_091646-3-scaled.jpg25601920adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2022-04-11 12:37:062022-09-29 11:17:16LiDAR (Light Detection and Ranging)
Dalam perencanaan perumahan salah satu elemen kunci adalah data lahan dari lahan yang akan dibangun. Data lahan yang diperlukan meliputi batas lahan, data topografi dan data tematik lainnya. Berikut adalah manfaat UAV Lidar untuk perencanaan perumahan
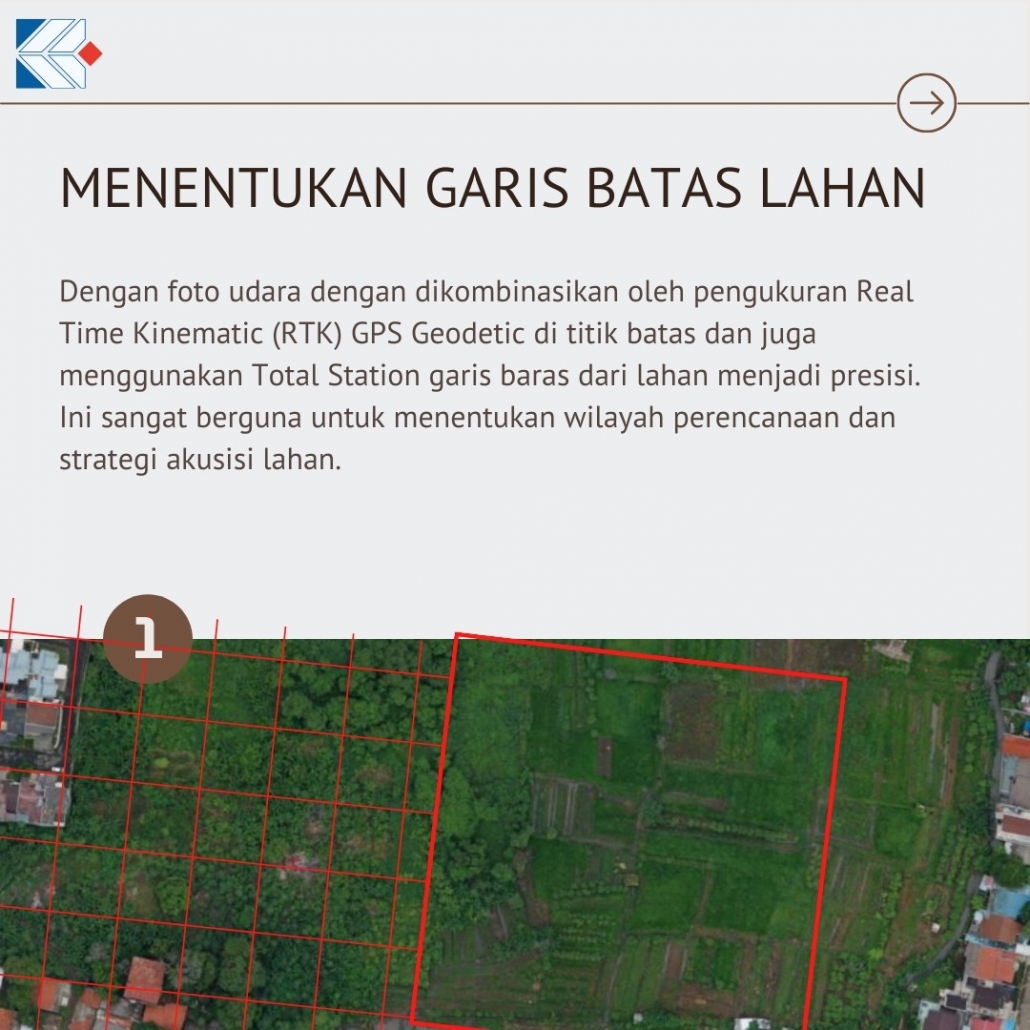
Menentukan Garis Batas Lahan. Dengan foto udara dengan dikombinasikan oleh pengukuran Real Time Kinematic (RTK) GPS Geodetic di titik batas dan juga menggunakan Total Station garis baras dari lahan menjadi presisi. Ini sangat berguna untuk menentukan wilayah perencanaan dan strategi akusisi lahan.
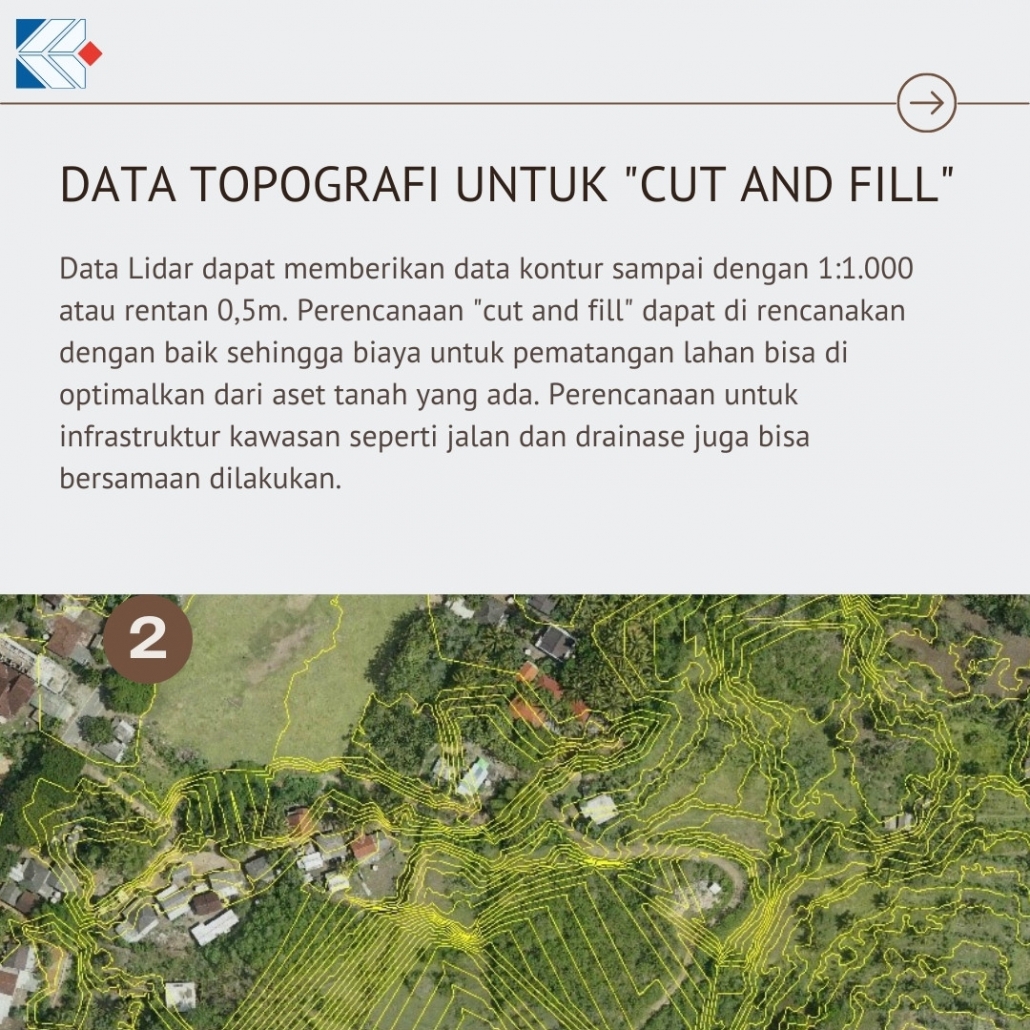
Data Topografi untuk “cut and fill”. Data Lidar dapat memberikan data kontur sampai dengan 1:1.000 atau rentan 0,5m. Perencanaan “cut and fill” dapat di rencanakan dengan baik sehingga biaya untuk pematangan lahan bisa di optimalkan dari aset tanah yang ada. Perencanaan untuk infrastruktur kawasan seperti jalan dan drainase juga bisa bersamaan dilakukan.
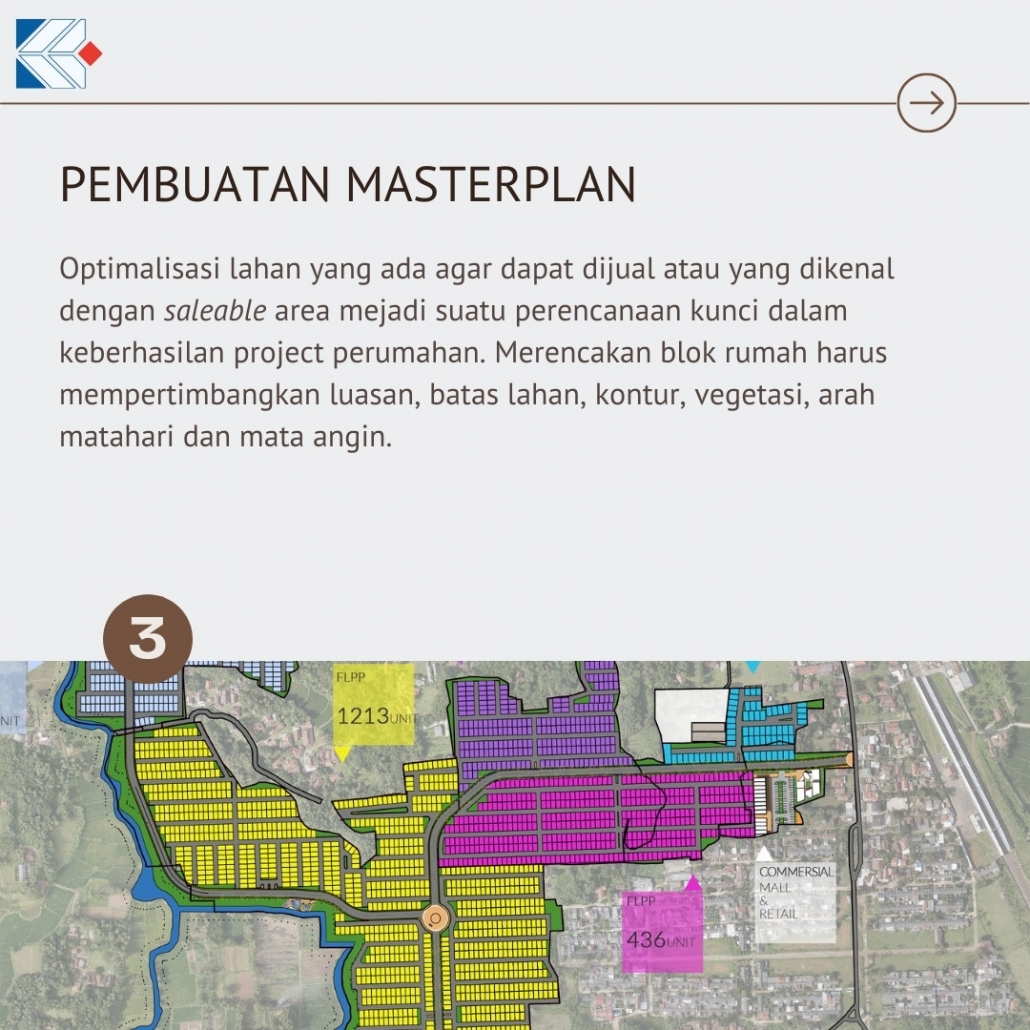
Pembuatan Masterplan. Optimalisasi lahan yang ada agar dapat dijual atau yang dikenal dengan saleable area mejadi suatu perencanaan kunci dalam keberhasilan project perumahan. Merencakan blok rumah harus mempertimbangkan luasan, batas lahan, kontur, vegetasi, arah matahari dan mata angin.
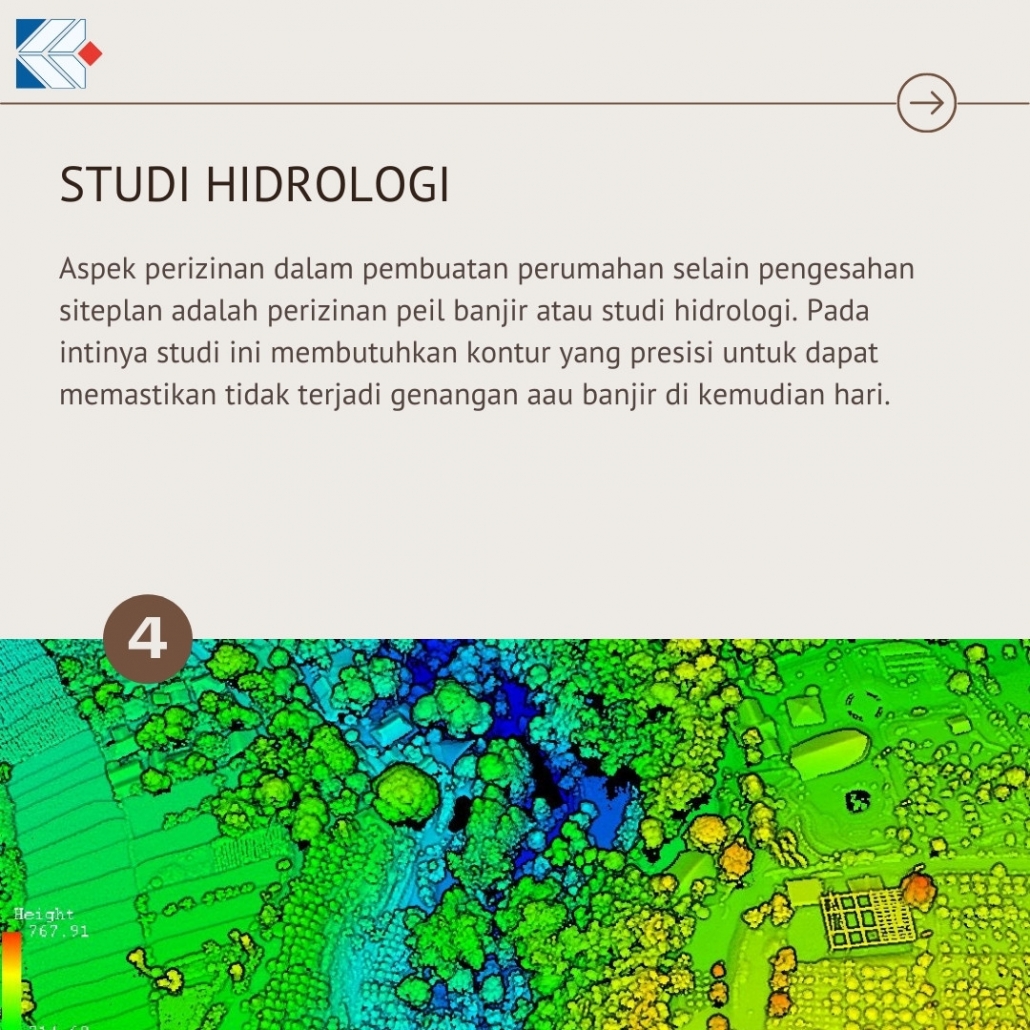
Studi Hidrologi. Aspek perizinan dalam pembuatan perumahan selain pengesahan siteplan adalah perizinan peil banjir atau studi hidrologi. Pada intinya studi ini membutuhkan kontur yang presisi untuk dapat memastikan tidak terjadi genangan aau banjir di kemudian hari.
Handal selaras sangat berpengalaman membantu perusahaan developer atau real estate dalam pengembangan desainnya. Sudah banyak perusahaan developer atau real estate menggunakan jasa UAV Lidar kami untuk mendapatkan data topografi untuk perencanaan masterplan, perencanaan detail, dan perizinan. UAV Lidar memastikan biaya, mutu dan waktu lebih baik dengan metodologi yang tepat. KHS memastikan biaya yang terjangkau, mutu yang terbaik, dan waktu tercepat dalam proses survey sampai penyajian data.
https://www.handalselaras.com/wp-content/uploads/2022/04/1.jpg10801080adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2022-04-03 22:27:042022-04-04 14:03:52UAV Lidar untuk Perencanaan Perumahan
Bagi sebagian orang, istilah-istilah dalam pemetaan dengan utilisasi drone mungkin sedikit membingungkan. Banyak yang terkecoh dengan istilah-istilah seperti PPK dan RTK karena gagal memahami perbedaan di antara keduanya. Memang, pada dasarnya kedua istilah tersebut berada di landasan yang sama dalam dunia pemetaan drone. Baik PPK maupun RTK memiliki fungsi untuk mengoreksi lokasi dari data pemetaan drone dan mengeliminasi fungsi GCP. Keduanya menghasilkan tingkat akurasi yang absolut sampai ke rentang centimeter (cm).
Kendati demikian, memilih satu di antara keduanya kadang memiliki dampak yang signifikan terhadap data yang dihasilkan atau bagaimana keduanya mempengaruhi kelancaran proses survei. Pada kegiatan survei udara, faktor-faktor seperti hambatan dan kondisi lingkungan sangat penting untuk dipertimbangkan. Dengan memilih metode koreksi yang tepat tentu akan menghemat proses pekerjaan dan biaya pengeluaran. Berkaitan dengan hal tersebut, maka penting rasanya untuk mengulik lebih dalam perbedaan di antara keduanya.
Eliminasi Fungsi GCP
Sebelum melanjutkan perjalanan dan membahas lebih jauh mengenai PPK dan RTK, ada baiknya kita memahami terlebih dahulu fungsi dari GCP atau Ground Control Points. Pada proses pemetaan menggunakan drone, GCP merupakan titik yang terletak di permukaan bumi yang berfungsi sebagai penanda suatu lokasi. GCP biasanya sengaja dibuat atau merupakan objek eksisting yang koordinatnya sudah diketahui atau mudah diamati. Sebelum dilakukan rektifikasi, atau proses transformasi data dari sebuah sistem grid menggunakan transformasi geometrik mengacu pada sistem koordinat tertentu, GCP digunakan sebagai titik referensi koordinat.
Dalam proses pemetaan digital, persiapan GCP dilakukan sebelum eksekusi pengambilan gambar udara. Tidak ada patokan jumlah GCP yang harus tersedia pada pemetaan dalam luasan tertentu. Banyak pendekatan yang dapat digunakan pada penentuan jumlah dan lokasi GCP, namun yang terpenting adalah GCP dapat terpotret dan dikenali dengan baik pada produk foto maupun video. Pemasangan GCP pada dasarnya akan memakan waktu yang lama, apalagi jika site yang akan diamati memiliki luasan yang besar.
Contoh GCP
Sumber: Internet, 2020
Untuk itu, melalui kecanggihan teknologi masa kini, pemetaan secara digital dengan utilisasi drone dapat menjadi lebih sederhana dan efisien. Salah satunya adalah dengan mentransformasi penggunaan GCP menjadi penggunaan GPS Correction Technology.
GPS Correction Technology meningkatkan kualitas lokasi data dengan memanfaatkan global position system receivers untuk menghasilkan sebuah data yang akurat. Teknologi ini sudah difungsikan dengan menggunakan beragam alat beberapa tahun belakangan. Hanya saja hal tersebut tergolong baru di dunia pemetaan dengan utilisasi drone. Fungsi dari GCP dan GPS Correction Technology ada dasarnya sama, yang membedakan hanyalah GPS Correction Technology tidaklah memakan waktu yang lama untuk persiapan. GPS Correction Technology dapat meningkatkan proses pengumpulan data sebesar 75%. Dan dapat menghasilkan alur pekerjaan yang lebih lancar dikarenakan adanya efisiensi waktu. Saat ini terdapat dua teknologi yang mendominasi pembicaraan mengenai GPS Correction Technology, yaitu Post Processing Kinematic (PPK) dan Real Time Kinematic (RTK) yang akan menjadi inti pembahasan artikel ini.
Post Processing Kinematic (PPK)
PPK merupakan teknologi koreksi data lokasi setelah pengambilan data berupa pemotretan selesai dilaksanakan kemudian data tersebut haruslah diunggah ke dalam cloud. Drone PPK akan terbang bersama dengan GNSS PPK receiver yang berfungsi mengumpulkan data dari satelit dan mencatatnya untuk kebutuhan pengambilan data setelah penerbangan.
Data satelit kerap kali mengalami error dikarenakan penundaan troposfer dan menyediakan akurasi data maksimal sekitar satu meter. Data satelit dari GNSS receiver dikumpulkan pada stasiun pangkalan dan setelah penerbangan berakhir data-data tersebut dikumpulkan dengan data drone untuk mengkoreksi sinyal error satelit, membawa akurasi turun ke tingkatan centimeter.
Dalam teknologi PPK, baik komunikasi data GNSS ke data drone, atau komunikasi data drone ke data koreksi drone sangatlah dibutuhkan. Ketika drone mendarat, proses koreksi harus diaplikasikan pada software yang sesuai. Data dengan akurasi yang absolut selanjutnya tersedia untuk tahap selanjutnya dan menghasilkan hasil survey pemetaan.
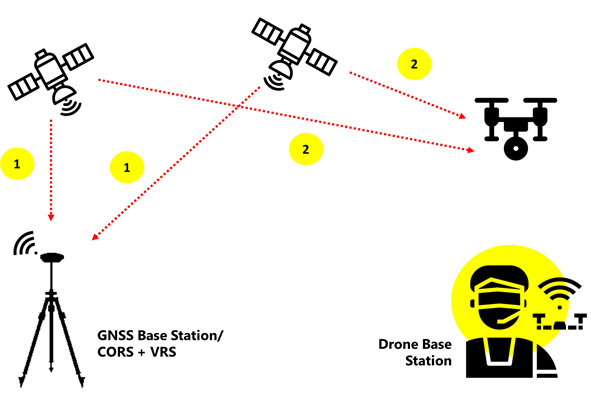
Proses PPK
Sumber: Handal Selaras, 2020
Keterangan:
PPK membutuhkan komunikasi yang konstan untuk mengoreksi lokasi data satelit.
1. Garis antara satelit dan pangkalan GNSS atau jaringan CORS
2. Garis antara satelit dan drone
Real Time Kinematic (RTK)
RTK merupakan teknologi koreksi data lokasi yang memungkinkan untuk dilakukan secara real time pada saat drone menjalankan fungsi pemotretannya. Drone RTK membawa serta GNSS RTK receiver pada armada drone yang berfungsi untuk mengumpulkan data dari satelit dan stasiun pangkalan untuk secara akurat mengoreksi gambar lokasi bersamaan saat armada drone tersebut terbang.
Data satelit kerap kali mengalami error dikarenakan penundaan troposfer dan menyediakan akurasi maksimal sekitar satu meter. Data dari pangkalan stasiun darat diperhitungkan untuk mengoreksi kesalahan sinyal satelit, membawa akurasi turun ke tingkatan centimeter (cm). Dalam perihal teknologi RTK, lancarnya jaringan komunikasi yang tidak terinterupsi merupakan sebuah persyaratan dari stasiun pangkalan GNSS, melalui stasiun pangkalan drone ke drone itu sendiri. Ketika drone mendarat, jika seluruh sinyal konstan dan stabil, data dengan akurasi yang absolut akan tersedia untuk proses selanjutnya yaitu hasil survey pemetaan.
Pada dasarnya akan sangat menguntungkan jika data dapat dikoreksi secara bersamaan ketika waktu terbang. Kendati demikian, pada kondisi sesungguhnya, terdapat hambatan-hambatan yang dapat mengganggu sinyal dan penerbangan. Hal tersebutlah yang menjadi pertimbangan utilisasi teknologi RTK pada survei pemetaan. Di waktu lain, ketika koneksi antara stasiun pangkalan dan drone stabil, RTK dapat mencapai tingkat akurasi yang setara dengan PPK.
Proses RTK
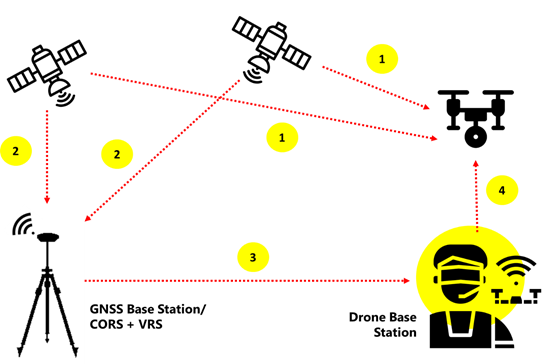
Sumber: Handal Selaras, 2020
Keterangan:
RTK membutuhkan empat garis komunikasi yang konstan untuk mengkoreksi data lokasi satelit.
Garis antara satelit dan drone
Garis antara satelit dan pangkalan GNSS atau jaringan CORS
Garis antara pangkalan GNSS atau CORS/VRS dan stasiun drone
Garis antara stasiun drone dan drone
Perbandingan PPK dan RTK
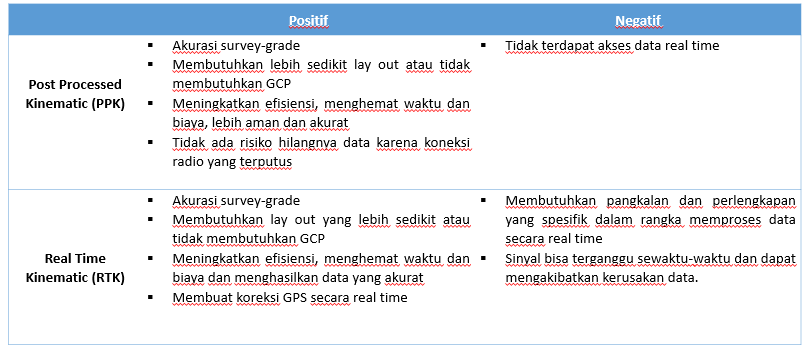
Setelah mendapatkan gambaran mengenai apa itu PPK dan RTK, maka dapat dilakukan perbandingan di antara keduanya seperti pada tabel yang tertera di bawah ini:
Perbandingan PPK dan RTK
Sumber: heliguy.com, 2019
Setelah mengetahui karakteristik PPK dan RTK serta perbandingannya, maka teknologi mana yang sesuai dengan kebutuhan Anda?
Daftar Referensi
Wingtra. 2020. What’s the Difference Between PPK and RTK Drones, and Which One is Better?. https://wingtra.com/ppk-drones-vs-rtk-drones/?utm_campaign=Facebook%20paid%20ads%202020&utm_source=facebook&utm_medium=paidsocial&utm_content=ppk-vs-rtk&hsa_acc=187616638541841&hsa_cam=23846058559280553&hsa_grp=23846094172900553&hsa_ad=23846094172890553&hsa_src=fb&hsa_net=facebook&hsa_ver=3
Rabkin, B. 2020. GCP Vs. PPK/RTK: Which is Best to Receive Fast and Accurate Data?. https://www.identifiedtech.com/blog/drone-technology/gcps-ppk-rtk-best-receive-fast-accurate-data/
Willoughby, J. 2019. Is RTK The Future of Drone Mapping?. https://www.heliguy.com/blog/2019/01/24/is-rtk-the-future-of-drone-mapping/
https://www.handalselaras.com/wp-content/uploads/2020/11/350afc65-bb0d-4aa9-8ddc-6b993bc04b92.jpg8531280adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2020-11-24 14:54:472020-11-24 14:54:48Drone PPK dan RTK: Apa Bedanya?
Oleh : Tike Aprillia, ST, Fella Faradiva, dan Mutia Arifah Rachim
Bidang fotogrametri dewasa ini berkembang hingga fotogrametri jarak dekat atau biasa disebut sebagai CRP (Close Range Photogrammetry). Teknologi yang semakin maju memunculkan adanya kamera digital dengan resolusi yang tinggi. CRP merupakan metode untuk mengambil data ukuran dari citra foto untuk dibuat model 3D dari sebuah objek atau untuk kebutuhan pemetaan. Dengan kamera SLR non-metrik, metode CRP dapat menjadi alternatif yang lebih murah dari laser scanner.
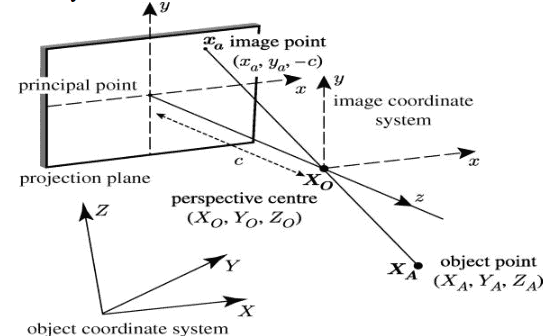
Gambar 1 Kondisi Kolinearitas
Pada fotogrametri jarak dekat menggunakan sistem proyeksi sentral dengan kamera sebagai pusat proyeksi, pengukuran terhadap suatu objek dilakukan terhadap hasil perekaman dari kamera. Saat sebuah foto diambil, berkas sinar dari objek akan menjalar menuju pusat lensa kamera hingga mencapai bidang film. Kondisi dimana titik objek, titik pusat kamera dan titik objek pada bidang foto terletak satu garis dalam ruang dinamakan kondisi kesegarisan berkas sinar atau kondisi kolinearitas (colinearity condition). Kondisi ini merupakan syarat fundamental dalam fotogrametri. Pada fotogrametri jarak dekat, jarak antar objek dan kamera tidak lebih dari 100 meter.
Secara garis besar proses pengolahan CRP dilakukan sebagai berikut:
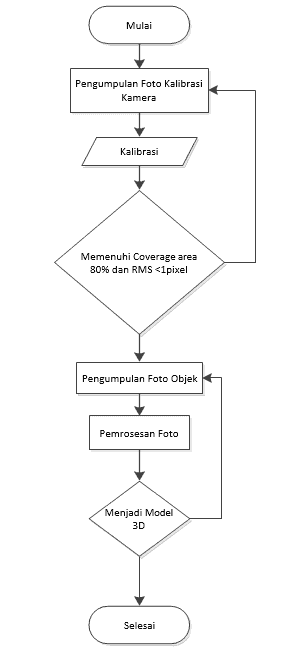
Gambar 2 Proses pengolahan CRP
Kalibrasi kamera
Kalibrasi kamera adalah proses menentukan parameter internal dari sebuah kamera. Parameter internal digunakan untuk merekontruksi ulang berkas sinar saat pemotretan dilakukan dan digunakan untuk mengetahui besarnya kesalahan sistematik dari sebuah kamera. Proses kalibrasi bertujuan untuk mencari parameter intrinsik dan parameter ekstrinsik menggunakan image 2D pada suatu objek, yang dikorespondensikan dengan koordinat 3D objek. Korespondensi tersebut dapat diartikan sebagai transformasi antar sistem koordinat. Beberapa parameter tersebut antara lain, resolusi kamera, rotasi kamera, focal lenght, titik pusat koordinat, dan distorsi lensa. Salah satu software yang dapat digunkan pada tahap kalibrasi kamera digital non metrik adalah software Photomodeler. Metode kalibrasi pada Photomodeler menggunakan prinsip menghitung parameter internal kamera secara analisis terhadap titik target dengan mengunakan self calibration bundle adjustment. Saat proses kalibrasi nilai Average Photo Point Coverage minimal berjumlah 80% dan nilai RMS kurang dari 1. Nilai tersebut bertujuan agar objek yang diamati semakin detail. Jika nilai Average Photo Point Coverage masih kurang dari 80% dan RMS lebih dari 1 maka harus mengkalibrasi ulang.
2. Pengambilan objek
Sebelum melakukan pengambilan objek, perlu diperhatikan agar foto dapat dimodelkan menjadi 3D, syarat tersebut berdasarkan 3 prinsip dasar CRP yaitu kesegarisan, interseksi ruang, dan reseksi ruang. Saat pengambilan objek harus memenuhi beberapa persyaratan seperti objek harus terlihat dari semua sisi (360°), garis orientasinya konsisten dan logis, jarak pemotretan konsisten atau sama, fokus kamera DSLR harus sama dengan fokus saat kalibrasi, terjadi pertampalan antar foto, dan orientasinya sama.
3. Pengolahan model 3D objek
Pemodelan yaitu membentuk suatu benda atau obyek sehingga terlihat seperti hidup. Sesuai dengan obyek dan basisnya, proses pembentukan model 3D objek secara keseluruhan dikerjakan dengan komputerisasi. Keseluruhan obyek bisa diperlihatkan secara 3 dimensi melalui proses dan desain sehingga disebut sebagai pemodelan 3 dimensi (3D modelling). Prinsip dasar dari proses CRP adalah model 3D diperoleh dari pengukuran pertampalan antar foto dengan berbagai sudut pandang dan pengukuran dari orientasi kamera. Model 3D terbentuk dari point clouds yang dihasilkan foto stereo secara otomatis yang kemudian diproses secara komputerisasi. Pemilihan data point clouds berperan penting dalam penentuan kerapatan objek dan keaslian bentuk objek. Pengolahan model 3D objek dapat dilakukan dengan softwarePhotomodeler.
Close range photogrammetry atau fotogrametri jarak dekat dapat menjadi solusi alternatif yang lebih murah untuk pembuatan model 3D dari sebuah objek atau untuk kebutuhan pemetaan. Namun, metode ini memakan waktu yang cukup lama dalam memproses data citra fotonya, selain itu metode ini sangat dibatasi oleh kemampuan hardware dan software dalam mengkalkulasi parameter-parameter yang ada, baik parameter orientasi kamera ataupun koordinat objek yang diukur.
REFERENSI:
Atkinson, K. B. (1996). Close Range Photogrammetry and Machine Vision. Caithness: Whittles Publising.
Prasetyo, Y. (2019). Materi Kuliah Fotogrametri II. Semarang: Universitas Diponegoro.
Soetaat. (1994). Diktat Fotogrametri Analitik. Yogyakarta: Universitas Gadjah Mada.
https://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.png00adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2020-10-26 23:28:382021-02-09 12:14:16Close Range Photogrammetry (CRP)
Energi panas bumi adalah energi panas yang tersimpan dalam batuan di bawah permukaan bumi dan fluida yang terkandung di dalamnya. Energi panas bumi telah dimanfaatkan untuk pembangkit listrik di Itali sejak tahun 1913 dan di New Zealand sejak tahun 1958. Pemanfaatan energi panas bumi untuk sektor non‐listrik (direct use) telah berlangsung di Iceland sekitar 70 tahun. Meningkatnya kebutuhan akan energi serta meningkatnya harga minyak, khususnya pada tahun 1973 dan 1979, telah memacu negara-negara lain, termasuk Amerika Serikat, untuk mengurangi ketergantungan mereka pada minyak dengan cara memanfaatkan energi panas bumi. Saat ini energi panas bumi telah dimanfaatkan untuk pembangkit listrik di 24 Negara, termasuk Indonesia. Disamping itu fluida panas bumi juga dimanfaatkan untuk sektor non-listrik di 72 negara, antara lain untuk pemanasan ruangan, pemanasan air, pemanasan rumah kaca, pengeringan hasil produk pertanian, pemanasan tanah, pengeringan kayu, kertas, dll.
Di Indonesia usaha pencarian sumber energi panas bumi pertama kali dilakukan di daerah Kawah Kamojang pada tahun 1918. Pada tahun 1926 hingga tahun 1929 lima sumur eksplorasi dibor dimana sampai saat ini salah satu dari sumur tersebut, yaitu sumur KMJ‐3 masih memproduksikan uap panas kering atau dry steam. Pecahnya perang dunia dan perang kemerdekaan Indonesia mungkin merupakan salah satu alasan dihentikannya kegiatan eksplorasi di daerah tersebut. Kegiatan eksplorasi panas bumi di Indonesia baru dilakukan secara luas pada tahun 1972. Direktorat Vulkanologi dan Pertamina, dengan bantuan Pemerintah Perancis dan New Zealand melakukan survei pendahuluan di seluruh wilayah Indonesia. Dari hasil survei dilaporkan bahwa di Indonesia terdapat 217 prospek panas bumi, yaitu di sepanjang jalur vulkanik mulai dari bagian Barat Sumatera, terus ke Pulau Jawa, Bali, Nusa Tenggara dan kemudian membelok ke arah utara melalui Maluku dan Sulawesi. Survei yang dilakukan selanjutnya telah berhasil menemukan beberapa daerah prospek baru sehingga jumlahnya meningkat menjadi 256 prospek, yaitu 84 prospek di Sumatera, 76 prospek di Jawa, 51 prospek di Sulawesi, 21 prospek di Nusatenggara, 3 prospek di Irian, 15 prospek di Maluku dan 5 prospek di Kalimantan. Sistem panas bumi di Indonesia umumnya merupakan sistem hidrotermal yang mempunyai temperatur tinggi (>225 oC), hanya beberapa diantaranya yang mempunyai temperatur sedang (150‐225 oC).
Berdasarkan data Direktorat Panas Bumi EBTKE, potensi panas bumi yang dimiliki Indonesia sangatlah besar yaitu sekitar 23,9 GW, pemanfaatan panas bumi secara nasional baru 8% atau sekitar 2.130,7 MW. Pemanfaatan panas bumi pada saat ini setara dengan pemakaian BBM domestik sebesar 32.000* BOE per hari (= 92.000 BOE per hari minyak mentah) atau sekitar 81.200 BOE* per hari BBM domestik pada tahun 2025 jika target RUPTL sebesar 6.310 MW tercapai. Perhitungan ini dengan asumsi 1 MWh PLTP = 0,613 SBM (HESSI, KESDM 2018). Pemerintah menargetkan pengembangan panas bumi hingga satu dasawarsa kedepan (tahun 2020-2030) mencapai 8.007,7 MW. Ini artinya, dengan kapasitas terpasang saat ini yaitu 2.130,7 MW, masih diperlukan sekitar 177 proyek pengembangan panas bumi dengan kapasitas total sekitar 5.877 MW hingga tahun 2030. Pemerintah Indonesia juga mencanangkan bauran energi baru terbarukan mencapai 23% pada 2025 dan naik lagi 31 persen pada 2050. Sebaliknya, bauran energi dari minyak bumi pada 2050 diturunkan separuhnya dari saat ini 40%. Di sisi lain, pengembangan panas bumi masih memerlukan insentif tambahan untuk mencapai kelayakan proyeknya ditengah tingginya resiko eksplorasi dan keterbatasan akses infrastruktur ke lokasi pengembangan.
Risiko Eksplorasi, Eksploitasi, dan Pengembangan Lapangan Panas Bumi
Proyek panas bumi memiliki resiko yang tinggi dan memerlukan dana yang besar, oleh karena itu sebelum suatu lapangan panas bumi dikembangkan perlu dilakukan pengkajian yang hati-hati untuk menilai apakah sumber daya panas bumi yang terdapat di daerah tersebut menarik untuk diproduksikan. Penilaian kelayakan meliputi beberapa aspek, yang utama adalah: aspek teknis, pasar dan pemasaran, finansial, legal, serta sosial ekonomi.
Dari segi aspek teknis, hal‐hal yang harus dipertimbangkan adalah:
Sumber daya mempunyai kandungan panas atau cadangan yang besar sehingga mampu memproduksikan uap untuk jangka waktu yang cukup lama, yaitu sekitar 25‐30 tahun.
Reservoirnya tidak terlalu dalam, biasanya tidak lebih dari 3 km.
Sumber daya panas bumi terdapat di daerah yang relatif tidak sulit dicapai.
Sumber daya panas bumi memproduksikan fluida yang mempunyai pH hampir netral agar laju korosinya relatif rendah, sehingga fasilitas produksi tidak cepat terkorosi. Selain itu hendaknya kecenderungan fluida membentuk skala relatif rendah.
Sumber daya panas bumi terletak di daerah dengan kemungkinan terjadinya erupsi hidrotermal relatif rendah. Diproduksikannya fluida panas bumi dapat meningkatkan kemungkinan terjadinya erupsi hidrotermal.
Hasil kajian dampak lingkungan.
Dari aspek pasar dan pemasaran, hal‐hal yang harus dipertimbangkan adalah kebutuhan konsumen dan ketersediaan jaringan distribusi. Dari aspek finansial, perlu dilakukan pengkajian terhadap dana yang diperlukan, sumber dana, proyeksi arus kas, indikator ekonomi, seperti NPV, IRR, PI dll, serta perlu juga dipertimbangkan pengaruh perubahan ekonomi makro. Dari aspek sosial ekonomi, perlu dipertimbangkan pengaruh proyek terhadap penerimaan negara, kontribusi proyek terhadap penerimaan pajak, jasa‐jasa umum yang dapat dinikmati manfaatnya oleh masyarakat dan kontribusi proyek terhadap kesempatan kerja, alih teknologi dan pemberdayaan usaha kecil
Light Detection and Ranging (LiDAR)
LiDAR atau juga dikenal sebagai LADAR adalah akronim untuk light detection and ranging. LiDAR adalah teknologi yang menerapkan sistem penginderaan jauh sensor aktif untuk menentukan jarak dengan menembakkan sinar laser yang dipasang pada wahana pesawat. Jarak didapatkan dengan menghitung waktu antara ditembakkannya sinar laser dari sensor sampai diterima kembali oleh sensor.
LiDAR dapat dengan cepat mengukur permukaan bumi dengan laju pengambilan sampel data lebih besar dari 150 kilohertz (150.000 pulsa per detik)[1]. LiDAR menghasilkan produk berupa kumpulan titik awan (points cloud) yang tergeoreferensi, sehingga menghasilkan representasi tiga dimensi (3D) dari permukaan bumi dan objek-objek diatasnya. Sistem LiDAR pada umumnya banyak beroperasi dengan menggunakan gelombang near infrared (NIR). Namun beberapa sensor pun ada yang menggunakan spektrum gelombang hijau untuk menembus air dan mendeteksi keadaan di dasar air.
LiDAR dapat memperoleh data di bawah kanopi pohon. Hal ini lah yang menjadi keunggulan LiDAR dibandingkan dengan fotogrametri dan pemetaan menggunakan citra satelit. Meskipun tidak semua data di bawah kanopi pohon dapat diperoleh, tetapi data tersebut dapat dijadikan sampel titik permukaan tanah di daerah yang berpohon tersebut. Hal ini karena LiDAR menggunakan sinar laser, sehingga selama masih ada celah cahaya yang bisa menembus ke bawah kanopi pohon, maka data LiDAR dapat diperoleh.
Teknologi UAV LiDAR dalam Pengembangan Panas Bumi
Teknologi light detection and ranging (LiDAR) saat ini telah banyak dikembangkan. Output LiDAR berupa data tiga dimensi (3D) dengan akurasi yang cukup tinggi dan pengambilan data yang lebih cepat menjadikan teknologi ini mulai banyak diaplikasikan dalam berbagai bidang. Sehingga, teknologi ini dapat digunakan sebagai alternatif dari teknologi pemetaan secara konvensional (pemetaan terestris). Pada area pengukuran yang luas, LiDAR akan sangat efisien digunakan dibandingkan dengan metode pemetaan konvensional. Hal ini karena waktu pengambilan dan pemrosesan data dapat dilakukan lebih cepat. Selain itu output LiDAR sudah dalam bentuk digital, sehingga tidak perlu dilakukan proses digitalisasi. Pada perkembangan awalnya, LiDAR dibawa oleh wahana pesawat udara atau disebut dengan Airborne LiDAR. Namun karena biaya sewa pesawat cukup mahal, maka dikembangkanlah wahana pesawat tanpa awak yang dapat membawa sensor LiDAR. Pesawat tanpa awak ini dikenal juga sebagai Unmanned Aerial Vehicle (UAV).
Secara garis besar di bidang panas bumi, teknologi LiDAR bisa membantu mulai dari perencanaan pembuatan infrastruktur sampai dengan monitoring seluruh lokasi pada tahap eksploitasi. Selanjutnya akan dibahas secara detail aplikasi UAV LiDAR pada pengembangan panas bumi.
Aplikasi UAV LiDAR
Teknologi LiDAR yang menghasilkan output dengan akurasi data yang akurat, menjadikan teknologi ini mulai banyak digunakan dalam pengembangan Geotermal dimana lokasi panas bumi yang pada umumnya berada di kawasan hutan dengan topografi berbukit:
Pemetaan Kawasan Hutan
Sinar laser yang dipancarkan oleh LiDAR dapat menembus celah-celah kecil pada kanopi pohon. Hal ini menjadikan LiDAR dapat merekam data di bawah kanopi pohon. Sehingga, dengan menggunakan LiDAR dapat dihasilkan Data Elevation Model (DEM) pada kawasan hutan. DEM dalam pemetaan kawasan hutan digunakan untuk menentukan rencana pembuatan infrastruktur lokasi pemboran panas bumi.
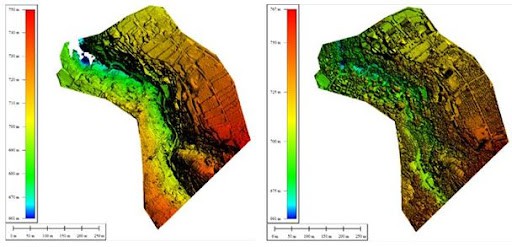
Gambar 1. Point cloud LiDAR bisa langsung memberikan gambaran profil dalam hutan.
(Hasil Olahan PT. Kreasi Handal Selaras, 2020)
Perencanaan Infrastruktur
Data LiDAR memudahkan perencanaan dan pengembangan infrastruktur panas bumi (desain lokasi kluster pemboran, akses jalan, dan fasilitas pendukung lainnya). Selain itu juga digunakan dalam penyiapan data perizinan dan pembebasan lahan. Perencanaan dan pengembangan infrastruktur dapat lebih spesifik, karena UAV LiDAR bisa terbang rendah.
Gambar 2. Point cloud LiDAR mengenai semua obyek di atas permukaan tanah.
(Hasil Olahan PT. Kreasi Handal Selaras, 2020)
Mitigasi dan Pemantauan Tanah Longsor
Pada pemantauan tanah longsor, pengambilan data LiDAR dilakukan secara berkala dalam selang waktu tertentu. Pergerakan tanah dapat dipantau dari perubahan data yang didapatkan. Pemantauan tanah longsor menggunakan LiDAR akan menghasilkan model tiga dimensi dari lereng yang diamati.
Gambar 3. Digital Elevation Model (DEM) tanah longsor.
(Hasil Olahan Data PT. Kreasi Handal Selaras)
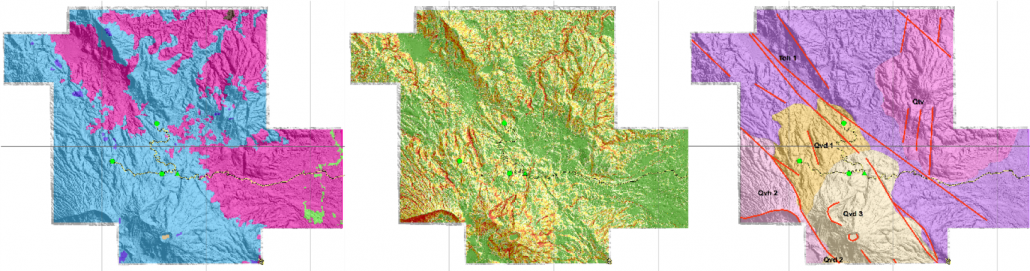
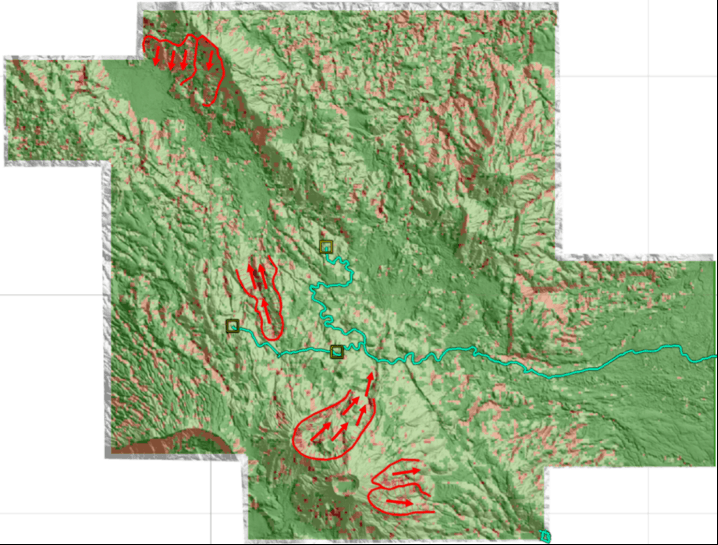
Data LiDAR dalam Pemetaan Geohazard
Data berupa LiDAR, foto udara, peta geologi, dan peta tata guna lahan dikumpulkan untuk diolah menjadi zonasi rawan longsor yang kemudian digunakan sebagai Peta Rekomendasi Lahan. Peta ini digunakan sebagai acuan awal dalam penentuan lokasi yang baik berdasarkan kajian geoteknik. Kajian geoteknik ini merupakan upaya pengidentifikasian titik/daerah yang berpotensi menjadi geohazard secara local maupun regional. Persiapan berikutnya adalah membuat Peta Tata Guna Lahan dan Peta Kemiringan Lereng berdasarkan data LiDAR dan foto udara. Kemudian, Peta Tata Guna Lahan, Peta Kemiringan Lereng, dan Peta Geologi dibagi berdasarkan kelas tertentu dan pemberian bobot pada masing-masing kelas dilakukan.
Ketiga peta tersebut digabungkan dengan metode Weighted Overlay. Pemberian bobot juga dilakukan untuk masing-masing peta berdasarkan pengaruh terhadap potensi pergerakan tanah. Kemudian, Peta Rekomendasi Lokasi terbentuk sesuai dengan zonasi potensi longsor yang terbagi menjadi 5 kelas, yaitu Sangat Aman, Aman, Layak, Rawan, dan Sangat Rawan. Berdasarkan Peta Rekomendasi Lahan dan Peta Daerah Tangkapan Air yang didapatkan dari hasil pengolahan data LiDAR, lokasi yang berpotensi mengalami pergerakan tanah dapat diinterpretasi arah pergerakannya. Arah pergerakan dari potensi pergerakan tanah tersebut juga telah didasarkan pada kondisi lapangan.
Gambar 5. Potensi Pergerakan Tanah
Referensi :
[1] Center, N. C. (2012). Lidar 101: An Introduction to Lidar Technology, Data, and Applications. Charleston: SC: NOAA Coastal Services Center.
https://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.png00adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2020-07-29 12:37:292020-07-29 22:07:22APLIKASI UAV LIDAR DALAM PENGEMBANGAN PANAS BUMI
Salah satu kegunaan drone selain mengambil foto udara maupun video aerial adalah membantu bidang agrikultur dalam melakukan pengawasan serta penyiraman pestisida di areal perkebunan dan perhutanan yang sangat luas.
Saat ini terdapat berbagai jenis drone yang bisa mempermudah pekerjaan petani dalam mengawasi, menyemprot, melakukan pemupukan, dan menyeprotkan pestisida, salah satunya DJI Agras T-16. Drone Dji Agras T-16 menjadi drone andalan dari banyak professional, dimana drone hexacopter ini sangat memberikan efisiensi kerja untuk membantu dalam memberikan pestisida secara menyeluruh dan akurat kepada tanamannya.
Daya yang Dioptimalkan, Performa Tak Tertandingi
Agras T16 memiliki struktur keseluruhan yang disempurnakan dengan desain modular dan mendukung muatan tertinggi dan lebar semprotan terluas untuk drone pertanian dan perhutanan DJI. Dengan perangkat keras yang lebih kuat dan tangguh, mesin Artifical Intelegent, dan perencanaan operasi 3D, DJI Agras T16 membawa efisiensi operasi ke tingkat yang baru.
Struktur Merevolusi. Operasi yang Handal.
Desain modular T16 yang serba baru menyederhanakan perakitan dan mempercepat perawatan harian. Peringkat IP67 memberikan perlindungan yang andal untuk komponen kunci drone. Sebuah badan pesawat ringan, namun tahan lama terbuat dari komposit serat karbon dan dapat dengan cepat dilipat untuk 25% dari ukuran aslinya, sehingga mudah untuk transportasi. Baterai dan tangki semprotan mudah ditukar, secara signifikan meningkatkan efisiensi pasokan daya dan cairan.
Payload Lebih Tinggi. Peningkatan Efisiensi.
Didukung oleh kinerja terbangnya yang luar biasa, tangki semprotan T16 dapat mengangkut hingga 16 L, dan lebar semprotan telah meningkat menjadi 6,5 m. Sistem penyemprotan memiliki 4 pompa pengiriman dan 8 alat penyiram dengan kecepatan semprot maksimum 4,8 L / menit. T16 dapat menyemprotkan 24,7 acre (10 hektar) [1] per jam. Sistem penyemprotan juga memiliki flow meter elektromagnetik baru, memberikan presisi dan stabilitas yang lebih tinggi daripada flow meter konvensional.
Radar Yang Lebih Canggih. Mudah Dioperasikan.
Sistem radar T16 yang ditingkatkan dapat merasakan lingkungan operasi di siang atau malam hari, tanpa terpengaruh oleh cahaya atau debu. Drone ini telah sangat meningkatkan keselamatan penerbangan dengan penghindaran rintangan maju dan mundur dan FOV horizontal (bidang pandang) 100 °, dua kali lipat drone pertanian DJI sebelumnya. T16 juga dapat mendeteksi sudut kemiringan dan menyesuaikannya secara otomatis bahkan di daerah pegunungan. Sistem radar inovatif ini mengadopsi teknologi Digital Beam Forming (DBF), yang mendukung pencitraan cloud titik 3D yang secara efektif merasakan lingkungan dan membantu menghindari rintangan.
Keunggulan DJI Agras T16 Dibandingkan Dengan Spraying Drone Lainnya
Efisiensi maksimum
Penyemprotan akurat
Mudah digunakan
Memiliki kecerdasan memori
Desain yang dapat dilipat
Memiliki sensor ketinggian
Dikendalikan dengan remot kontrol
SPESIFIKASI DJI AGRAS T16
Aircraft Frame
Diagonal Wheelbase
1520 mm
Frame Arm Length
625 mm
Dimensions
1471mm x 1471mm x 482mm (arm unfolded, without propellers)780mm x 780mm x 482mm (arm folded)
Motor
Diagonal Wheelbase
1520 mm
Frame Arm Length
625 mm
Dimensions
1471mm x 1471mm x 482mm (arm unfolded, without propellers)780mm x 780mm x 482mm (arm folded)
ESC
Max Allowable Current (Continuous)
25 A
Operating Voltage
12S LiPo
Signal Frequency
30 to 450 Hz
Drive PWM Frequency
12 kHz
Foldable Propeller
Material
High-performance engineered plastics
Diameter / Pitch
21×7.0 inch (533×178 mm)
Weight
58 g
Liquid Tank
Volume
10 L
Standard Operating Payload
10 kg
Max Battery Size
151mm x 195mm x 70mm
Nozzle
Model
XR11001
Quantity
4
Max Spray Speed
0.43 L/min (per nozzle, for water)
Spray Width
4 – 6 m (4 nozzles, 1.5 – 3 m above the crops)
Droplet Size*
XR11001: 130~250 μm*Droplet size may vary according to operation environment and spraying speed.
Flight Parameters
Total Weight (without batteries)
8.8 kg
Standard Takeoff Weight
22.5 kg
Max Takeoff Weight
24.5 kg (@ sea level)
Max Thrust-Weight Ratio
1.81 (with 22.5 kg takeoff weight)
Power Battery
DJI Designated Battery (MG-12000)
Max Power Consumption
6400 W
Hovering Power Consumption
3250 W (with 22.5 kg takeoff weight)
Hovering Time
24 min (@ with 12.5 kg takeoff weight)10 min (@ with 22.5 kg takeoff weight)
Max Operating Speed
8 m/s
Max Flying Speed
22 m/s
Recommended Operating Temperature
0 to 40℃
Remote Controller
Model
GL690B(Japan Only), GL658C
Operating Frequency
2.400 – 2.483 GHz
Max Transmission Range (unobstructed, free of interference)
1km
EIRP
100 mW @ 2.4 GHz
Built-in Battery
6000 mAh, 2S LiPo
Charging
DJI charger
Output Power
9 W
Operating Temperature Range
-10 to 40℃
Storage Temperature Range
Less than 3 months: -20 to 45℃More than 3 months: 22 to 28℃
Kemunculan fotogrametri dengan menggunakan pesawat nirawak (UAV) menjadi jalan baru penggunaan metode fotogrametri dalam analisis lingkungan seperti lingkungan hutan dan daerah sulit terjamah oleh metode akuisisi lainnya. Jika dibandingkan dengan pengukuran fotogrametri dengan kamera metric dan penerbangan dengan ketinggian tinggi maupun dengan survey berbasis LiDAR, metode ini tetap memiliki resolusi spasial dan temporal yang tinggi [1].
CHM atau Canopy Height Model merupakan representasi dari tinggi pohon pada wilayah pengukuran. Tinggi pohon diukur melalui jarak antara ground (permukaan) dengan titik tertinggi pohon. Untuk daerah dengan tutupan lahan yang secara keseluruhannya merupakan pepohonan, tidak diperlukan tindakan lebih lanjut sebelum CHM dikalkulasi. Beda hal jika terdapat perumahan atau bangunan dalam area tersebut, untuk kondisi ini diperlukan pembersihan terlebih dahulu data tersebut.
Muncul pertanyaan, apa saja yang dapat kita lakukan dengan adanya CHM ini? Banyak pemanfaatan yang dilakukan oleh berbagai pihak dalam berbagai fungsi pemetaan dan analisis spasial (keruangan). Beberapa diantaranya sebagai berikut [2]:
Evaluasi resiko tinggi vegetasi terhadap saluran listrik
Memantau penebangan dan pemulihan hutan
Menilai kesesuaian habitat untuk satwa liar
Mengidentifikasi lokasi pohon-pohon yang memenuhi syarat masuk dalam kategori pohon besar (klasifikasi pohon hutan)
Mengevaluasi pertumbuhan dan perkembangan pohon hutan industri
CHM merupakan hitungan turunan dari Digital Elevation Model (DEM) dan Digital Surface Model (DSM). Nilai CHM dapat diketahui dengan banyak cara, salah satunya adalah dengan melakukan pengurangan nilai DSM oleh DEM. DSM yang merupakan representasi dari nilai ketinggian keseluruhan objek di permukaan bumi dihilangkan permukaan tanahnya (ground) oleh DEM sehingga dihasilkan nilai ketinggian dari objek yang dihitung nol dari permukaan tanah. Secara singkat perhitungan nilai CHM dilakukan dengan cara berfikir seperti berikut:
DSM – DEM = CHM
Sebelum dapat menghasilkan nilai CHM dari DSM dan DEM, tentunya terdapat beberapa langkah dan metode yang harus dipenuhi terlebih dahulu. Sebelum menghasilkan nilai DSM, diperlukan data PointCloud, yang dapat dihasilkan dengan menggunakan metode fotogrametri maupun LiDAR. Secara singkat dengan menggunakan metode fotogrametri dapat dijelaskan sebagai berikut [3]:
Dilakukan aerial triangulation untuk mendapatkan nilai posisi dan ketinggian objek dari foto-foto yang diambil dengan menggunakan metode fotogrametri. Hasil ini berupa Sparse Point Cloud yang merupakan titik jarang yang merepresentasikan posisi suatu objek.
Nilai titik jarang tersebut kemudian diperbanyak sehingga menghasilkan titik-titik dengan kerapatan padat yang disebut dengan istilah Dense Point Cloud.
Interpolasi Dense Point Cloud yang menghasilkan Digital Surface Model (DSM)
Dilakukan proses klasifikasi, otomatis maupun manual yang menghasilkan data ketinggian Ground (DEM)
Kombinasi antara DSM dan DEM sehingga menghasilkan CHM
Perhitungan nilai CHM dapat dilakukan dengan menggunakan perangkat lunak ArcGIS, Global Mapper, Simactive, dan perangkat lunak pengolahan data spasial lainnya. Perhitungan dilakukan secara otomatis dengan menggunakan bahasa pemrograman yang terdapat pada masing-masing perangkat lunak.
Nilai ketelitian dari tinggi pohon yang diperoleh dengan menggunakan CHM dapat diperoleh dengan cara membandingkan beberapa sampel yang sama antara CHM dan data lapangan yang dipilih secara acak. Nilai ketelitian dari CHM sangat berpengaruh terhadap beberapa faktor, diantaranya:
· Nilai GSD (Ground Sample Distance)
Seperti yang kita ketahui bersama, nilai GSD merupakan ukuran resolusi piksel dari hasil foto udara, baik foto udara dengan kamera metrik maupun foto udara dengan kamera non metrik. Model permukaan bumi terbentuk dari data elevasi digital dalam tiga dimensi (X, Y, Z). Data elevasi digital ini disimpan dalam format piksel grid (raster). Setiap piksel mempunyai nilai elevasi yang mewakili ketinggian titik di permukaan bumi. Semakin besar nilai GSD pada foto udara, maka resolusi spasial yang dihasilkan akan semakin rendah, dan tingkat kedetailan dari objek-objek pada foto udara akan semakin berkurang [4]. Jika GSD yang digunakan besar (resolusi rendah), nilai tinggi yang direpresentasikan oleh CHM menjadi buruk. Hal ini dipengaruhi dengan besarnya GSD, nilai tertinggi sebenarnya dari pohon tidak dapat didefinisikan dengan jelas. Sehingga representasi hasil tinggi kurang atau tidak mendekati nilai tinggi sebenarnya di lapangan.
· Kualitas GCP
Kualitas Ground Control Point atau GCP juga ikut andil dalam ketelitian dari CHM yang dihasilkan. GCP berpengaruh dalam menentukan kedekatan posisi termasuk posisi horizontal dan vertikal dari objek pengamatan dalam hal ini pohon. Semakin baik kualitas GCP, maka akan semakin baik pula posisi dari objek pengamatan, yang secara langsung juga berpengaruh terhadap nilai CHM yang dihasilkan.
· Nilai Pembanding
Nilai ketelitian hasil suatu metode didapatkan dengan membandingkan dengan hasil metode lainnya. Namun nilai pembanding tersebut harus memiliki nilai yang lebih dipercaya sehingga jika hasil metode yang dibandingkan semakin mendekati pembanding, maka metode tersebut dapat digunakan. Misalkan nilai CHM dibandingkan dengan hasil pengukuran lapangan. Metode perhitungan yang dilakukan dalam pengukuran lapangan haruslah metode yang memiliki nilai kepercayaan yang dapat dipertanggungjawabkan dengan baik.
Jonathan Lisein, Stephanie Bonnet and Philippe Lejeune dari Universitas Liege – Gembloux Agro-Biotech melakukan penelitian mengenai ketelitian CHM dengan menggunakan metode fotogrametri dengan pesawat nirawak (UAV) yang dibandingkan dengan pengukuran tinggi di lapangan [3]. Didapatkan hasil seperti pada tabel berikut :
Resolusi/GSD
RMSE
25cm
2.1m
Dari hasil yang didapatkan, dapat ditarik kesimpulan berupa:
Penggunaan DEM dengan resolusi rendah dan akurasi yang tidak diketahui merusak nilai presisi dari DSM itu sendiri.
Rekonstruksi Tiga Dimensi pohon rapat dengan menggunakan foto bergantung pada kuat dan arah angin yang menyebabkan pergerakan daun, serta pengulangan bentuk pada kanopi hutan yang padat dan berdaun lebar, keduanya dapat menghambat/membingungkan dalam proses pembentukan dense point cloud.
Hasil co-registrasi DSM dan DTM untuk kawasan hutan tidak ketat secara ilmiah, karena kurangnya visibilitas tanah (tinggi vegetasi = 0) pada DSM.
Penggunaan fotogrametri untuk kawasan hutan rentan terhadap error, karena nilai tanah dibawah pohon tidak terlihat.
Kerapatan point cloud dapat mempengaruhi ketelitian dari nilai tinggi yang dihasilkan. Dapat terlihat pada gambar berikut:
Sumber : www.mpdi.com
Secara keseluruhan, metode menentukan ketinggian pohon (CHM) dengan menggunakan metode survei fotogrametri cukup efektif dan efisien jika dilakukan untuk menghasilkan data dengan ketelitian yang cukup baik. Untuk dapat memastikan layak atau tidaknya metode ini dilakukan, diperlukan pemilihan metoda akuisisi dan pengolahan data yang tepat seperti proses klasifikasi point cloud, spesifikasi alat, nilai GSD yang digunakan, metode pembanding yang digunakan, penggunaan parameter dalam pengolahan data pada perangkat lunak pengolahan data yang digunakan, dsb.
Sumber Referensi :
[1] Watts A.C., Ambrosia V.G., Hinkley E.A. [2012]. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing 4 (6), 1671–1692.
https://www.handalselaras.com/wp-content/uploads/2020/02/pohon-chm.png276683Authorhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngAuthor2020-02-05 14:36:532020-02-05 14:38:49Canopy Height Model (Chm) Menggunakan Survei Fotogrametri Untuk Perhitungan Tinggi Pohon
Keyword: presisi, akurasi, LiDAR (Light Detection and Ranging).
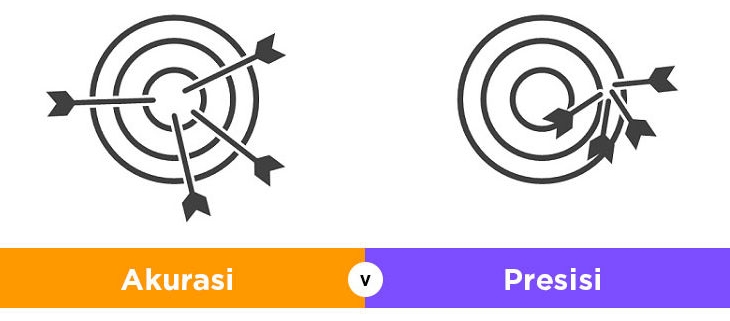
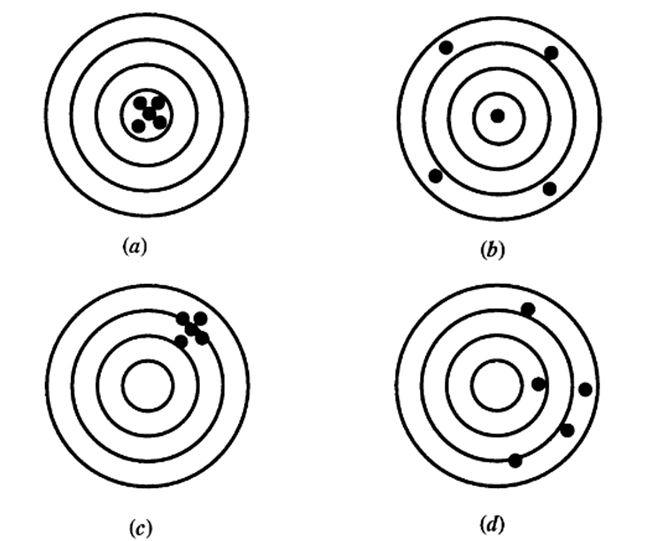
Dalam melakukan suatu pengukuran, untuk memastikan hasil ukuran yang didapatkan baik atau tidak digunakan istilah presisi dan akurasi. Presisi adalah tingkat konsistensi dari pengamatan yang ditentukan dari besarnya perbedaan dalam nilai data yang dihasilkan. Presisi sangat ditentukan oleh kestabilan kondisi pengamatan, kualitas alat, kemampuan dari pengamat, dan prosedur pengamatan. Sedangkan akurasi adalah tingkat kedekatan dari nilai pengamatan dengan nilai sebenarnya. Nilai sebenarnya dari suatu pengukuran tidak pernah dapat ditentukan, sehingga akurasi selalu tidak diketahui. [1] Namun, untuk mendekati nilai yang dianggap benar sering kali digunakan nilai rata-rata dari keseluruhan data yang diukur. Sehingga, hasil pengukuran akan memiliki tingkat akurasi yang tinggi apabila mendekati nilai rata-rata. Perbedaan presisi dan akurasi dapat dilihat pada ilustrasi di bawah ini:
Gambar 1. Akurasi dan Presisi.[1]
(1a) Akurat dan Presisi, (1b) Akurat, (1c) Presisi, (1d) Tidak Akurat dan Tidak Presisi.
Presisi dan akurasi pun sering dikaitkan dengan kesalahan sistematis dan kesalahan acak. Kesalahan sistematis adalah kesalahan dengan kecenderungan menggeser semua pengukuran secara sistematis, sehingga nilai rata-rata secara konstan bergeser atau bervariasi dan dapat diprediksi perubahannya serta dapat dikoreksi. Sedangkan kesalahan acak adalah kesalahan dengan variasi nilai kesalahannya tidak terduga dan tidak dapat dikoreksi. Kesalahan acak ini dapat disebabkan karena faktor lingkungan di tempat pengukuran, seperti terjadi kebisingan, adanya kabut, dan getaran sehingga mempengaruhi hasil pengukuran. Apabila hasil pengukuran memiliki nilai akurasi yang rendah, maka kemungkinan besar terdapat kesalahan sistematis pada alat pengukuran. Sehingga diperlukan kalibrasi pada alat tersebut. Apabila hasil pengukuran memiliki nilai presisi yang rendah, kemungkinan besar terdapat kesalahan acak pada pengukuran yang dilakukan.
Dalam pengukuran LiDAR, presisi dan akurasi dapat dilihat dari sebaran data point cloud yang dihasilkan antar jalur terbang. Keakuratan data LiDAR dapat dilihat dari tingkat kedekatan point cloud dengan posisi aktual dari lingkungan yang dijelaskan. Sedangkan kepresisian dari data LiDAR dapat dilihat dari tingkat kekonsistenan point cloud antar jalur terbang pada titik yang sama. Sehingga, untuk mendapatkan nilai presisi ini harus dilakukan pengukuran lebih pada suatu objek. Oleh karena itu, pada saat melakukan akuisisi data lidar diperlukan pertampalan antar jalur terbang (sidelap dan overlap). Data LiDAR yang memiliki tingkat presisi yang tinggi akan menghasilkan point cloud yang lebih tipis karena memiliki jarak antar point cloud yang kecil dan memiliki sedikit noise.[2] Ilustrasi dari akurasi dan presisi dari data LiDAR dapat dilihat pada Gambar 2.
Gambar 2. Akurasi dan Presisi.[2]
Sehingga untuk mendapatkan hasil pengukuran yang mendekati nilai sebenarnya, kesalahan sistematik maupun acak harus dihindari agar tingkat akurasi dan presisi dari data yang dihasilkan memiliki kualitas yang baik.
DAFTAR REFERENSI:
[1] Ghilani, Charles D dan Wolf, Paul R. 2006. Adjusment Computations Spatial Data Analysis. United States of America.
[2] Accuracy vs Precision. https://www.yellowscan-lidar.com/knowledge/wait-accuracy-vs-precision-isnt-rocket-science/?utm_source=hs_email&utm_medium=email&utm_content=81181499&_hsenc=p2ANqtz-9lnwORNL6_GfpxQre3qYVG3_Ykh7ZPDIctygB9BjeMocx-SeKScUmQ1DfHAia-2NGsymbjAHnuo2GoSb_CU-52hPyIMZV-oNjj-oPVj6w23CPnSpk&_hsmi=81181499, diakses pada tanggal 3 Februari 2020.
https://www.handalselaras.com/wp-content/uploads/2020/02/AkurasiPresisi-730x350-1.jpg350730adminhandalhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngadminhandal2020-02-03 21:18:002020-02-04 11:09:52PRESISI VS AKURASI PADA DATA LIDAR
Fotogrammetri dan LiDAR (Light detection and ranging) menggunakan wahana UAV (Unmanned Aerial Vehicle) memiliki perbedaan yang signifikan dalam akusisi dan hasilnya. Berikut adalah beberapa perbedaan antara Foto Udara dan LiDAR menggunakan wahana UAV:
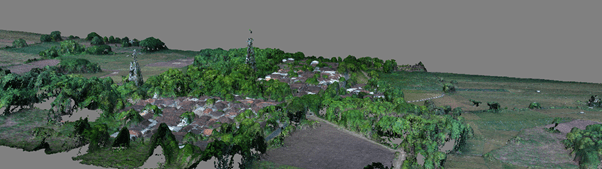
1. Foto udara menggunakan alat dasar kamera foto menghasilkan data raster (data grid) sedangkan Lidar menghasilkan data Point yang biasa disebut point cloud. Data foto udara dapat membentuk data point cloud, namun dengan kualitas dan densitas point yang lebih rendah dibandingkan point cloud yang dihasilkan oleh LiDAR
Gambar 1. Point Cloud Yang Dihasilkan Oleh Foto Udara
Pada Gambar 1. terlihat SUTET dan kabel listrik tidak terbentuk dengan sempurna. Selain itu objek pohon memiliki bentuk seperti bukit.
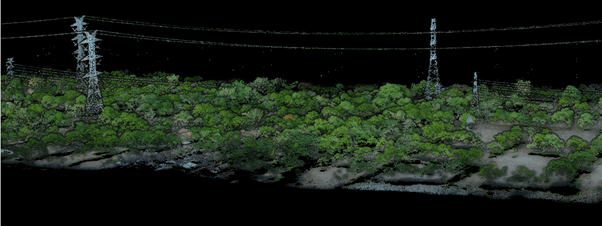
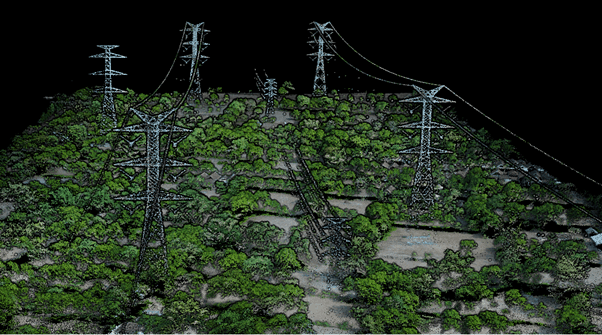
Gambar 2. Point Cloud yang Dihasilkan Oleh LiDAR
Pada Gambar 2. point cloud yang dihasilkan LiDAR memiliki densitas titik yang sangat rapat. Sehingga objek-objek terlihat seperti bentuk aslinya dalam tiga dimensi. Point cloud yang dihasilkan dapat ditampilkan berdasarkan ketinggian dan RGB dari masing-masing objek.
Gambar 3. SUTET dan Kabel yang Dihasilkan dari Akuisisi LiDAR
2. Foto udara menggunakan alat dasar kamera foto, pada dasarnya menghasilkan data dua dimensi yang memiliki akurasi lebih baik pada X dan Y (posisi). Sedangkan LiDAR menggunakan sensor yang dapat menembakkan gelombang terhadap objek dan gelombang yang dipantulkan diterima kembali oleh sensor tersebut. LiDAR akan menghasilkan data tiga dimensi yang memiliki karakteristik akurasi lebih baik pada Z (tinggi) dan dapat menembus permukaan tanah di bawah pohon selama terdapat celah cahaya yang dapat menembus pohon.
Gambar 4. Foto Udara yang Dihasilkan dari Akuisisi Fotogrametri Berupa Data Dua Dimensi
Gambar 5. Point Cloud yang Dihasilkan dari Akuisis LiDAR Berupa Data Tiga Dimensi
3. Analisisi Vegetasi dibawah jaringan listrik tegangan tinggi (SUTET) membutuhkan data Digital Terrain Model (DTM) yang akan diterjemahkan menjadi data kontur, data ketingian pohon dari data Digital Surface model (DSM), serta data model tiang dan kabel. Untuk itu, analisis vegetasi idealnya menggunakan data LiDAR. Namun untuk melakukan updating data dapat dilakukan dengan menggunakan data Foto Udara, dengan mendapatkan data DSM vegetasi dan mengesampingkan model tiang dan kabel SUTET.
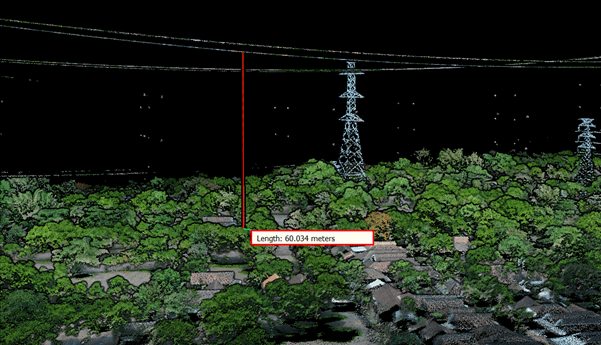
Gambar 6. Dengan Point Cloud LiDAR Dapat Diketahui Perbedaan Tinggi Kabel dan Objek Di Bawahnya
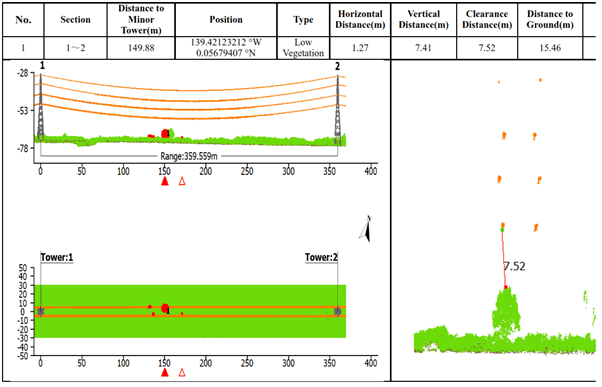
Gambar 7. Data LiDAR Dapat Diolah Untuk Mengetahui Danger Area Disekitar SUTET.
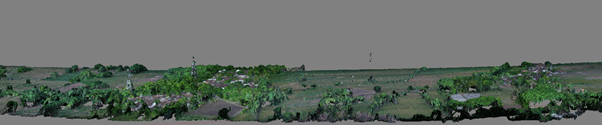
Gambar 8. SUTET terbentuk dalam point cloud foto udara, namun tidak sejelas pada data LiDAR. Sedangkan kabel listrik tidak terbentuk pada point cloud foto udara.
Gambar 9. Analisis menggunakan foto udara dapat menghitung jumlah pohon yang terdapat di bawah SUTET dan dapat dibuat analisis ketinggiannya, namun tidak bisa mendapatkan ketinggian dari kabelnya.
https://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.png00Authorhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngAuthor2020-01-21 15:39:072024-09-20 18:00:21Perbedaan Data Hasil Dari Fotogrametri dan LiDAR (Light Detection and Ranging) Dalam Aplikasi Inspeksi Jaringan Listrik Tegangan Tinggi (SUTET)
Teknologi light detection and ranging (LiDAR) saat ini telah banyak dikembangkan. Output LiDAR berupa data tiga dimensi (3D) dengan akurasi yang cukup tinggi dan pengambilan data yang lebih cepat menjadikan teknologi ini mulai banyak diaplikasikan dalam berbagai bidang. Sehingga, teknologi ini dapat digunakan sebagai alternatif dari teknologi pemetaan secara konvensional (pemetaan terestris).
Pada area pengukuran yang luas, LiDAR akan sangat efisien digunakan dibandingkan dengan metode pemetaan konvensional. Hal ini karena waktu pengambilan dan pemrosesan data dapat dilakukan lebih cepat. Selain itu output LiDAR sudah dalam bentuk digital, sehingga tidak perlu dilakukan proses digitalisasi.
Namun, teknologi LiDAR ini masih terdengar asing oleh orang awam. Sehingga, pada artikel ini akan dijelaskan mengenai apa itu LiDAR? Bagaimana prinsip kerja LiDAR? Apa saja output data LiDAR? Dan bagaimana pengaplikasian LiDAR dalam beberapa bidang?
LIGHT DETECTION AND RANGING (LIDAR)
LiDAR atau juga dikenal sebagai LADAR adalah akronim untuk light detection and ranging. LiDAR adalah teknologi yang menerapkan sistem penginderaan jauh sensor aktif untuk menentukan jarak dengan menembakkan sinar laser yang dipasang pada wahana pesawat. Jarak didapatkan dengan menghitung waktu antara ditembakkannya sinar laser dari sensor sampai diterima kembali oleh sensor.
LiDAR dapat dengan cepat mengukur permukaan bumi dengan laju pengambilan sampel data lebih besar dari 150 kilohertz (150.000 pulsa per detik) [6]. LiDAR menghasilkan produk berupa kumpulan titik awan (points cloud) yang tergeoreferensi, sehingga menghasilkan representasi tiga dimensi (3D) dari permukaan bumi dan objek-objek diatasnya. Sistem LiDAR pada umumnya banyak beroperasi dengan menggunakan gelombang near infrared (NIR). Namun beberapa sensor pun ada yang menggunakan spektrum gelombang hijau untuk menembus air dan mendeteksi keadaan di dasar air.
LiDAR dapat memperoleh data di bawah kanopi pohon. Hal ini lah yang menjadi keunggulan LiDAR dibandingkan dengan fotogrametri dan pemetaan menggunakan citra satelit. Meskipun tidak semua data di bawah kanopi pohon dapat diperoleh, tetapi data tersebut dapat dijadikan sampel titik permukaan tanah di daerah yang berpohon tersebut. Hal ini karena LiDAR menggunakan sinar laser, sehingga selama masih ada celah cahaya yang bisa menembus ke bawah kanopi pohon, maka data LiDAR dapat diperoleh.
KOMPONEN LIDAR
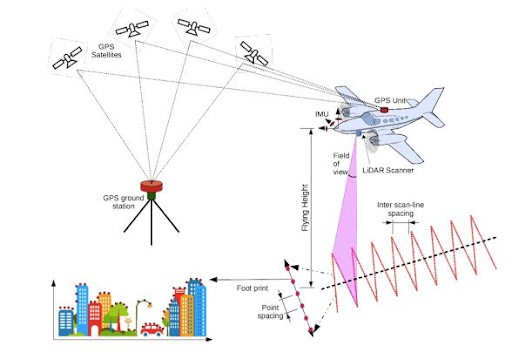
Sistem LiDAR terdiri dari empat komponen dasar, yaitu sensor LiDAR, Global Positioning System (GPS), Inertial Measuring Unit (IMU), dan kamera digital [5]. Komponen-komponen tersebut akan dijelaskan dalam uraian berikut:
1. Sensor LiDAR
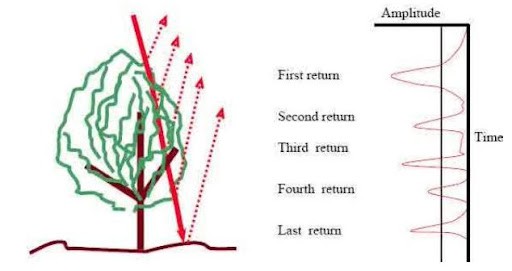
Sensor LiDAR berfungsi sebagai pemancar sinar laser ke objek dan merekam kembali setelah mengenai objek. Sensor laser memiliki beberapa karakteristik yang dapat dibedakan dari kekuatan sinar laser yang dipancarkan, cakupan dari pancaran sinar gelombang laser, dan jumlah sinar laser yang dihasilkan per detik. Salah satu karakteristik sensor laser LiDAR yang menjadi kelebihan LiDAR dibandingkan dengan yang lain adalah kemampuan gelombang tersebut untuk melakukan multiple return, yakni sensor LiDAR dapat merekam beberapa kali gelombang pantul dari objek yang ada dipermukaan bumi untuk setiap gelombang yang dipancarkan. Multiple return digunakan untuk menentukan bentuk dari objek atau vegetasi yang menutupi permukaan tanah. Gambar 1. menunjukkan ilustrasi dari multiple return. Gambar tersebut menunjukkan gelombang yang dipancarkan tidak hanya mengenai objek yang ada di atas permukaan tanah saja, tetapi juga mengenai permukaan tanah di bawah objek tersebut.
Multiple Return Sumber: Lohani, 2010
Permukaan objek yang pertama kali memantulkan pulsa laser akan menjadi gelombang pantul pertama (first return). Gelombang ini yang umumnya digunakan untuk membuat Digital Surface Model (DSM). Objek yang kedua kalinya memantulkan pulsa tersebut akan menjadi second return dan seterusnya hingga gelombang pantulan terakhir.
2. Global Positioning System (GPS)
Metode penentuan posisi GPS yang digunakan dalam sistem LiDAR adalah diferensial kinematik. Posisi wahana terbang selalu bergerak dan berubah-ubah dengan cepat ketika akuisisi data, maka dilakukan penentuan posisi GPS dengan metode kinematik untuk mendapatkan posisi dengan ketelitian yang tinggi. Pada Gambar 2. diilustrasikan konfigurasi antara base station dan rover, sehingga menghasilkan koordinat titik yang disimpan sebagai point cloud.
Metode Diferensial Kinematik yang Digunakan Pada LiDAR Sumber: Lohani dan Ghosh, 2017
Metode diferensial kinematik memerlukan dua buah receiver GPS. Satu receiver diletakkan pada sebuah titik yang telah diketahui koordinatnya di permukaan tanah yang berfungsi sebagai base (stasiun referensi), sedangkan receiver yang lain diletakkan pada wahana terbang sebagai roving receiver. Konfigurasi dari keduanya menghasilkan koreksi diferensial pada roving receiver, sehingga posisi laser pada wahana terbang dapat diketahui secara real time dan akurat [1]. Data GPS yang telah dihasilkan kemudian diolah secara post processing dan digabungkan dengan data Inertial Measuring Unit (IMU), sehingga diperoleh koordinat yang telah terdefinisi secara geografis
3. Inertial Measuring Unit (IMU)
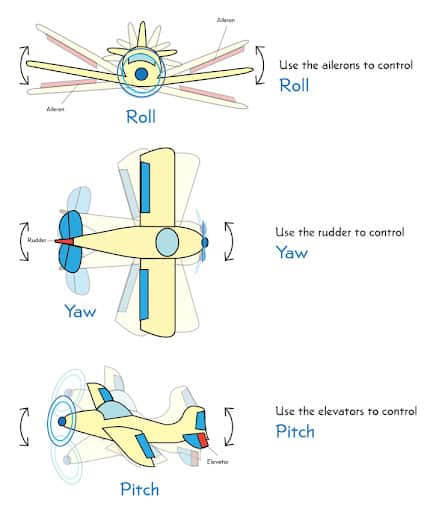
Inertial Measuring Unit (IMU adalah salah satu komponen dalam sistem LiDAR. IMU berfungsi sebagai instrumen yang mendeteksi pergeseran rotasi dari wahana terbang terhadap sumbu-sumbu sistem terbang. Sistem tersebut dapat mengukur sudut perubahan berupa attitude wahana terbang (pitch, roll, dan yaw) terhadap sumbu-sumbu terbang. Selain itu, IMU juga dapat mendeteksi perubahan percepatan pada wahana pesawat terbang. Gambar 3. mengilutrasikan keadaan pitch, roll, dan yaw dari wahana terbang.
Ilustrasi Pitch, Roll, dan Yaw Sumber: https://www.researchgate.net/figure/Inertial-Measurement-Unit-2_fig1_262883017
Pitch adalah pergerakan rotasi sumbu y wahana terbang terhadap sumbu y sistem terbang. Sumbu y wahana terbang didefiniskan sebagai garis pada bidang horizontal yang tegak lurus sumbu x wahana terbang. Sumbu y sistem referensi terbang didefinisikan sebagai garis yang tegak lurus dengan arah terbang horizontal wahana.
Roll adalah pergerakan rotasi sumbu x wahana terbang terhadap sumbu x pada sistem referensi terbang. Sumbu x wahana terbang didefinisikan sebagai garis lurus pada bidang horizontal yang melalui bagian depan (hidung) wahana terbang hingga bagian belakang (ekor) wahana terbang. Garis ini membagi dua badan pesawat sama besar. Sumbu x dari sistem referensi terbang didefinisikan sebagai garis yang berimpit dengan arah terbang horizontal wahana.
Yaw adalah sudut antara sumbu z wahana terbang terhadap arah utara. Sumbu z wahana terbang didefinisikan sebagai garis yang tegak lurus terhadap sumbu x dan y wahana terbang [5].
IMU memantau attitude wahana terbang sehingga dapat dilakukan koreksi untuk setiap posisi objek pada saat akuisisi data. Tanpa informasi dari IMU posisi footprint dari sinar laser yang dipancarkan tidak dapat diketahui secara pasti.
4. Kamera Digital
Kamera dalam sistem LiDAR berfungsi untuk menghasilkan foto dari area pengukuran LiDAR. Foto tersebut dapat ditumpang tindihkan (overlay) dengan data X, Y, Z hasil pengukuran LiDAR. Informasi ini digunakan ketika operator melakukan post processing data LiDAR [13].
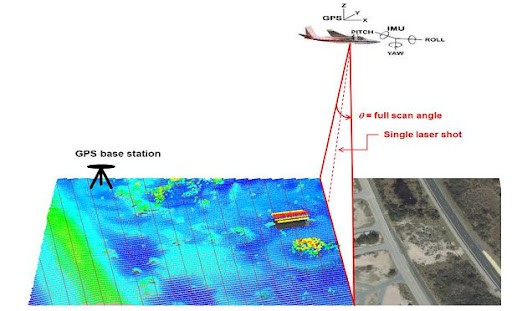
PRINSIP KERJA LIDAR
Secara umum prinsip kerja LiDAR adalah gelombang laser memancarkan pulsa dan memindai objek pada permukaan bumi, kemudian akan diukur waktu tempuh pulsa laser menuju suatu objek sampai kembali ke sensor. Hasil ukuran waktu tempuh tersebut dapat digunakan untuk menghitung jarak sensor ke objek. Setelah itu nilai jarak dan sudut pancaran akan dikoreksi menggunakan IMU untuk mendapatkan koreksi pergerakan wahana. Posisi tiga dimensi setiap titik yang direkam datanya akan didapatkan dari IMU yang diintegrasikan dengan GPS. GPS digunakan untuk terus mengatur ulang IMU agar mampu mendapatkan posisi dengan akurasi tinggi. Posisi GPS telah diikatkan pada sebuah stasiun pengamat, dan stasiun ini memberikan faktor koreksi bagi unit GPS yang terpasang di wahana. Ilustrasi prinsip kerja LiDAR ditunjukkan pada Gambar 4.
Ilustrasi Prinsip Kerja LiDAR Sumber: Center, 2012
Perbedaan waktu ketika sinar laser dipancarkan dan ketika sinar laser diterima oleh receiver optis dikalkulasi oleh perangkat lunak khusus untuk memproses dan mengkonversi data tersebut menjadi jarak terukur [6]:
dimana:
D : jarak antara sensor dan objek yang diukur (m),
c : kecepatan cahaya (3×108 m/s),
t : waktu tempuh pulsa laser pada saat ditembakkan dari sensor dan diterima kembali oleh sensor (s).
WAHANA LIDAR
Pada perkembangan awalnya, LiDAR dibawa oleh wahana pesawat udara atau disebut dengan Airborne LiDAR. Namun karena biaya sewa pesawat cukup mahal, maka dikembangkanlah wahana pesawat tanpa awak yang dapat membawa sensor LiDAR. Pesawat tanpa awak ini dikenal juga sebagai Unmanned Aerial Vehicle (UAV). Dimana wahana yang dimaksud dapat terbang sesuai dengan perencanaan terbang (autopilot) dan dapat melakukan pengambilan data LiDAR. UAV ini memungkinkan untuk melakukan pelacakan posisi dan orientasi dari sensor yang diimplementasikan dalam sistem lokal atau koordinat global [2].
Ilustrasi Airborne LiDAR dan UAV LiDAR
OUTPUT LIDAR
Data yang dihasilkan dari akuisisi data LiDAR yaitu data dalam bentuk point cloud. Point cloud merupakan kumpulan titik yang mewakili bentuk atau fitur tiga dimensi (3D). Setiap titik memiliki koordinat X, Y, dan Z. Ketika terdapat banyak kumpulan point cloud yang disatukan, maka point cloud tersebut akan membentuk suatu permukaan atau objek dalam bentuk 3D.
Kerapatan titik (point cloud) yang bisa dihasilkan oleh LiDAR yaitu 1- 300 titik/?2, hal ini bergantung dari beberapa faktor, diantaranya adalah metode akuisi (tinggi terbang, jenis konfigurasi sensor, dan jenis permukaan), serta sudut pandang sensor ke permukaan bumi (field of view) [9]. Akurasi vertikal dari data LiDAR adalah kurang dari 20 cm dan untuk horizontalnya adalah 30-50 cm dalam range 15-24 cm dan horizontal 30-64 cm [6].Data point cloud dapat digunakan untuk membuat model tiga dimensi permukaan bumi (3D), seperti digital elevation model (DEM), digital surface model (DSM), dan normalized digital surface model (NDSM). Namun, sebelumnya point cloud harus diklasifikasikan menjadi ground point dan non-ground point terlebih dahulu. Ground point adalah point cloud yang membentuk permukaan bumi, tanpa objek-objek diatasnya seperti vegetasi, rumah, dll. Sedangkan non-ground point adalah point cloud yang membentuk objek-objek diatas permukaan bumi, seperti vegetasi, rumah, dll. Ground point ini akan digunakan untuk membuat DEM, sedangkan non-ground point akan digunakan untuk membentuk DSM dan NDSM. Selain itu, DEM yang dihasilkan pun dapat digunakan lagi untuk membuat garis kontur.
Hasil Klasifikasi Ground Point dan Non-Ground Point Sumber: Hasil Olahan PT Kreasi Handal Selaras. 2019
Digital Elevation Model (DEM) merupakan penyajian persebaran titik diskrit yang merepresentasikan distribusi spatial elevation permukaan yang berubah-ubah dengan referensi datum tertentu [12]. DEM menyajikan permukaan bumi tanpa menampilkan fitur vegetasi, bangunan, dan struktur buatan manusia yang lainnya.
Digital Surface Model (DSM) adalah model permukaan bumi yang meluputi fitur alami maupun buatan manusia, misalnya gedung, vegetasi, dan pepohonan [3]. DSM juga merupakan model elevasi topografis permukaan bumi yang memberi batas acuan yang benar secara geometris. DSM menggambarkan puncak fitur yang terdapat di atas bare earth.
Hasil DEM dan DSM dari Akuisisi LiDAR Sumber: Hasil Olahan PT Kreasi Handal Selaras. 2019
Normalized Digital Surface Model (NDSM) adalah penyajian model elevasi objek pada permukaan datar. Model ini diperoleh dari perbedaan antara DSM dan DEM. NDSM dihitung dengan cara mengurangkan DSM dengan DEM [8]. Penghitungan ini akan didapatkan tinggi objek yang ada di atas permukaan tanah.
Garis kontur adalah garis khayal pada peta yang meghubungkan titik-titik dengan ketinggian yang sama. Garis kontur disajikan di atas peta untuk memperlihatkan naik turunnya keadaan permukaan tanah, juga untuk memberikan informasi slope (kemiringan tanah), irisan profil memanjam permukaan tanah terhadap jalur proyek, dan perhitungan galian serta timbunan (cut and fill) permukaan tanah.
APLIKASI LIDAR
Teknologi LiDAR yang menghasilkan output dengan akurasi data yang cukup akurat, menjadikan teknologi ini mulai banyak digunakan. Berikut adalah aplikasi LiDAR dalam beberapa bidang:
Pemodelan Banjir
Dalam pemodelan banjir, LiDAR berperan dalam membentuk digital elevation model (DEM). DEM yang dihasilkan dari LiDAR memiliki kualitas data dan resolusi spasial yang lebih baik dibandingkan dengan citra satelit. DEM ini berfungsi untuk membentuk model geometri sungai yang akan digunakan pada tahapan simulasi banjir [4].
Pemantauan Tanah Longsor
Pada pemantauan tanah longsor, pengambilan data LiDAR dilakukan secara berkala dalam selang waktu tertentu. Pergerakan tanah dapat dipantau dari perubahan data yang didapatkan. Pemantauan tanah longsor menggunakan LiDAR akan menghasilkan model tiga dimensi dari lereng yang diamati.
Pemetaan Kawasan Hutan
Sinar laser yang dipancarkan oleh LiDAR dapat menembus celah-celah kecil pada kanopi pohon. Hal ini menjadikan LiDAR dapat merekam data di bawah kanopi pohon. Sehingga, dengan menggunakan LiDAR dapat dihasilkan DEM pada kawasan hutan. DEM dalam pemetaan kawasan hutan digunakan untuk menentukan zonasi bahaya kebakaran hutan.
Survei Pertambangan
Pada survei pertambangan LiDAR digunakan untuk memantau kemiringan lereng, menghitung volum stock pile, dan melakukan cut and fill.
Jadi, sangat menarik bukan teknologi LiDAR ini? Menurut Anda, dapat diaplikasikan untuk apa lagi teknologi LiDAR ini?
DAFTAR REFERENSI
[1] Abidin, H. Z. 2000. Penentuan Posisi Dengan GPS dan Aplikasinya. Jakarta : Pradnya Paramita.
[2] Airborne LiDAR. https://serc.carleton.edu/details/images/83475.html, diakses pada tanggal 31 Oktober 2019.
[3] ASPRS, 2007, Digital Elevation Model Technologies and Applications: The DEM Users Manual, 2nd Edition, edited by David F. Maune, Bethesdha, Maryland.
[4] Asriyah, Nur., Budi Harto, Agung., dan Wikantika, Ketut. 2017. Pemanfaatan Teknologi Light Detection and Ranging (LiDAR) Dalam Pemodelan Banjir Akibat Luapan Air Sungai, Bunga Rampai Forum Peneliti Muda Indonesia. Bandung : Istitut Teknologi Bandung.
[5] Burtch, Robert. 2001. LiDAR Principles and Applications. Big Rapids.
[6,1] Center, N. C. (2012). Lidar 101: An Introduction to Lidar Technology, Data, and Applications. Charleston: SC: NOAA Coastal Services Center.
[7,2] Eisenbeiß, H., Zurich, E. T. H., Eisenbeiß, H., & Zürich, E. T. H. (2009). UAV photogrammetry. Institute of Photogrammetry and Remote Sensing.
[8] Grigillo, D., Kosmatin Fras, M., dan Petrovič, D. 2011. Automatic Extraction and Building Change Detection from Digital Surface Model and Multispectral Orthophoto, Geodetski vestnik, 55(1), 28-45.
[9,3] Kandia, P. (2012). Pembentukan Model untuk Estimasi Kelapa Sawit Menggunakan Data Light Detection and Ranging (LIDAR). Bandung: Institut Teknologi Bandung.
[10] Lohani, Bharat dan Ghosh, Suddhasheel. 2017. Airborne LiDAR Technology: A Review of Data Collection and Processing Systems. Proceedings of the National Academy of Sciences. India.
[11] Lohani, B., 2010, Multiple return LiDAR, http://home.iitk.ac.in/~blohani/ (diakses pada tanggal 31 Oktober 2019).
[12] Meijerink, A. M. J., dkk., 1994, Introduction to The Use of Geographic Information Systems for Practical Hydrology, International Institute for Aerospace Survey and Earth Sciences (ITC). Enschede.
[13] Moskal, L. Monika. 2008. LiDAR Fundamentals: Part One, Workshop on Site-scale Application of LiDAR on Forest Lands in Washington, Center for Urban Holticulture. University of Washington.
[14] Pitch, Roll, and Yaw. https://howthingsfly.si.edu/flight-dynamics/roll-pitch-and-yaw, diakses pada tanggal 31 Oktober 2019.
[15] UAV LiDAR. http://www.uavexpertnews.com/2019/04/nextcore-releases-nextcore-rn-series/, diakses pada tanggal 31 Oktober 2019.
https://www.handalselaras.com/wp-content/uploads/2019/11/mountainside_cirgis_2400x1000.jpg12632400Authorhttps://www.handalselaras.com/wp-content/uploads/2022/09/KHS-Logo-2-300x126.pngAuthor2019-11-04 11:16:322022-04-05 11:55:22Apa itu LiDAR?
Scroll to top
var pageTitle = document.getElementById('whateverTheTitleElementIs').innerHTML;
if (pageTitle == 'Documentation H Sawangan City') {
}