Close Range Photogrammetry (CRP)
Oleh : Tike Aprillia, ST, Fella Faradiva, dan Mutia Arifah Rachim
Bidang fotogrametri dewasa ini berkembang hingga fotogrametri jarak dekat atau biasa disebut sebagai CRP (Close Range Photogrammetry). Teknologi yang semakin maju memunculkan adanya kamera digital dengan resolusi yang tinggi. CRP merupakan metode untuk mengambil data ukuran dari citra foto untuk dibuat model 3D dari sebuah objek atau untuk kebutuhan pemetaan. Dengan kamera SLR non-metrik, metode CRP dapat menjadi alternatif yang lebih murah dari laser scanner.
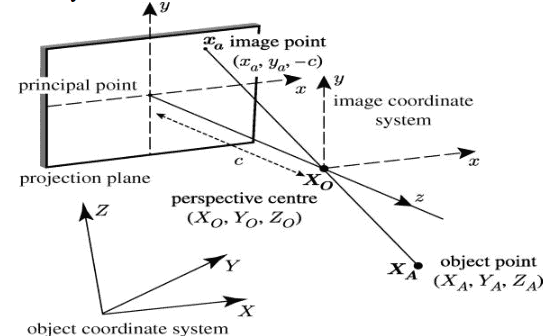
Pada fotogrametri jarak dekat menggunakan sistem proyeksi sentral dengan kamera sebagai pusat proyeksi, pengukuran terhadap suatu objek dilakukan terhadap hasil perekaman dari kamera. Saat sebuah foto diambil, berkas sinar dari objek akan menjalar menuju pusat lensa kamera hingga mencapai bidang film. Kondisi dimana titik objek, titik pusat kamera dan titik objek pada bidang foto terletak satu garis dalam ruang dinamakan kondisi kesegarisan berkas sinar atau kondisi kolinearitas (colinearity condition). Kondisi ini merupakan syarat fundamental dalam fotogrametri. Pada fotogrametri jarak dekat, jarak antar objek dan kamera tidak lebih dari 100 meter.
Secara garis besar proses pengolahan CRP dilakukan sebagai berikut:
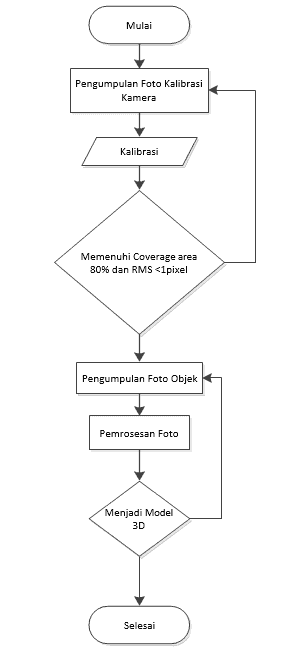
- Kalibrasi kamera
Kalibrasi kamera adalah proses menentukan parameter internal dari sebuah kamera. Parameter internal digunakan untuk merekontruksi ulang berkas sinar saat pemotretan dilakukan dan digunakan untuk mengetahui besarnya kesalahan sistematik dari sebuah kamera. Proses kalibrasi bertujuan untuk mencari parameter intrinsik dan parameter ekstrinsik menggunakan image 2D pada suatu objek, yang dikorespondensikan dengan koordinat 3D objek. Korespondensi tersebut dapat diartikan sebagai transformasi antar sistem koordinat. Beberapa parameter tersebut antara lain, resolusi kamera, rotasi kamera, focal lenght, titik pusat koordinat, dan distorsi lensa. Salah satu software yang dapat digunkan pada tahap kalibrasi kamera digital non metrik adalah software Photomodeler. Metode kalibrasi pada Photomodeler menggunakan prinsip menghitung parameter internal kamera secara analisis terhadap titik target dengan mengunakan self calibration bundle adjustment. Saat proses kalibrasi nilai Average Photo Point Coverage minimal berjumlah 80% dan nilai RMS kurang dari 1. Nilai tersebut bertujuan agar objek yang diamati semakin detail. Jika nilai Average Photo Point Coverage masih kurang dari 80% dan RMS lebih dari 1 maka harus mengkalibrasi ulang.
2. Pengambilan objek
Sebelum melakukan pengambilan objek, perlu diperhatikan agar foto dapat dimodelkan menjadi 3D, syarat tersebut berdasarkan 3 prinsip dasar CRP yaitu kesegarisan, interseksi ruang, dan reseksi ruang. Saat pengambilan objek harus memenuhi beberapa persyaratan seperti objek harus terlihat dari semua sisi (360°), garis orientasinya konsisten dan logis, jarak pemotretan konsisten atau sama, fokus kamera DSLR harus sama dengan fokus saat kalibrasi, terjadi pertampalan antar foto, dan orientasinya sama.
3. Pengolahan model 3D objek
Pemodelan yaitu membentuk suatu benda atau obyek sehingga terlihat seperti hidup. Sesuai dengan obyek dan basisnya, proses pembentukan model 3D objek secara keseluruhan dikerjakan dengan komputerisasi. Keseluruhan obyek bisa diperlihatkan secara 3 dimensi melalui proses dan desain sehingga disebut sebagai pemodelan 3 dimensi (3D modelling). Prinsip dasar dari proses CRP adalah model 3D diperoleh dari pengukuran pertampalan antar foto dengan berbagai sudut pandang dan pengukuran dari orientasi kamera. Model 3D terbentuk dari point clouds yang dihasilkan foto stereo secara otomatis yang kemudian diproses secara komputerisasi. Pemilihan data point clouds berperan penting dalam penentuan kerapatan objek dan keaslian bentuk objek. Pengolahan model 3D objek dapat dilakukan dengan software Photomodeler.
Close range photogrammetry atau fotogrametri jarak dekat dapat menjadi solusi alternatif yang lebih murah untuk pembuatan model 3D dari sebuah objek atau untuk kebutuhan pemetaan. Namun, metode ini memakan waktu yang cukup lama dalam memproses data citra fotonya, selain itu metode ini sangat dibatasi oleh kemampuan hardware dan software dalam mengkalkulasi parameter-parameter yang ada, baik parameter orientasi kamera ataupun koordinat objek yang diukur.
REFERENSI:
Atkinson, K. B. (1996). Close Range Photogrammetry and Machine Vision. Caithness: Whittles Publising.
Prasetyo, Y. (2019). Materi Kuliah Fotogrametri II. Semarang: Universitas Diponegoro.
Soetaat. (1994). Diktat Fotogrametri Analitik. Yogyakarta: Universitas Gadjah Mada.

Leave a Reply
Want to join the discussion?Feel free to contribute!