PRESISI VS AKURASI PADA DATA LIDAR
Tike Aprillia Hartini
Keyword: presisi, akurasi, LiDAR (Light Detection and Ranging).
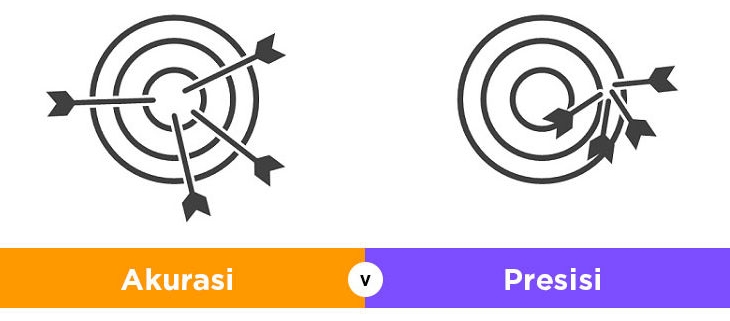
Dalam melakukan suatu pengukuran, untuk memastikan hasil ukuran yang didapatkan baik atau tidak digunakan istilah presisi dan akurasi. Presisi adalah tingkat konsistensi dari pengamatan yang ditentukan dari besarnya perbedaan dalam nilai data yang dihasilkan. Presisi sangat ditentukan oleh kestabilan kondisi pengamatan, kualitas alat, kemampuan dari pengamat, dan prosedur pengamatan. Sedangkan akurasi adalah tingkat kedekatan dari nilai pengamatan dengan nilai sebenarnya. Nilai sebenarnya dari suatu pengukuran tidak pernah dapat ditentukan, sehingga akurasi selalu tidak diketahui. [1] Namun, untuk mendekati nilai yang dianggap benar sering kali digunakan nilai rata-rata dari keseluruhan data yang diukur. Sehingga, hasil pengukuran akan memiliki tingkat akurasi yang tinggi apabila mendekati nilai rata-rata. Perbedaan presisi dan akurasi dapat dilihat pada ilustrasi di bawah ini:
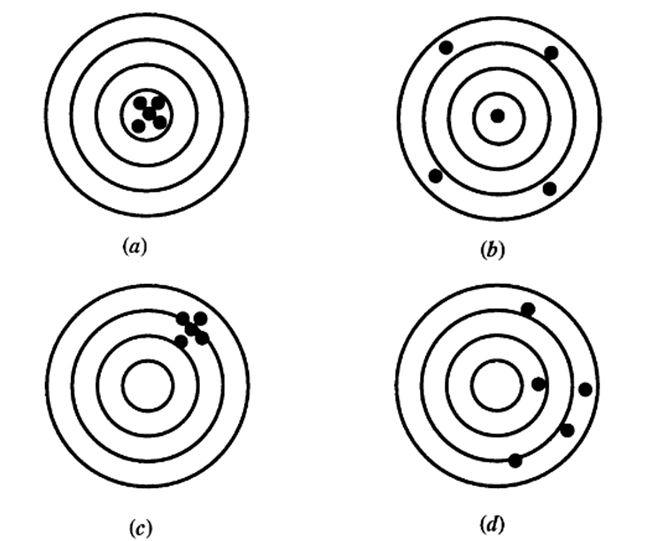
Gambar 1. Akurasi dan Presisi.[1]
(1a) Akurat dan Presisi, (1b) Akurat, (1c) Presisi, (1d) Tidak Akurat dan Tidak Presisi.
Presisi dan akurasi pun sering dikaitkan dengan kesalahan sistematis dan kesalahan acak. Kesalahan sistematis adalah kesalahan dengan kecenderungan menggeser semua pengukuran secara sistematis, sehingga nilai rata-rata secara konstan bergeser atau bervariasi dan dapat diprediksi perubahannya serta dapat dikoreksi. Sedangkan kesalahan acak adalah kesalahan dengan variasi nilai kesalahannya tidak terduga dan tidak dapat dikoreksi. Kesalahan acak ini dapat disebabkan karena faktor lingkungan di tempat pengukuran, seperti terjadi kebisingan, adanya kabut, dan getaran sehingga mempengaruhi hasil pengukuran. Apabila hasil pengukuran memiliki nilai akurasi yang rendah, maka kemungkinan besar terdapat kesalahan sistematis pada alat pengukuran. Sehingga diperlukan kalibrasi pada alat tersebut. Apabila hasil pengukuran memiliki nilai presisi yang rendah, kemungkinan besar terdapat kesalahan acak pada pengukuran yang dilakukan.
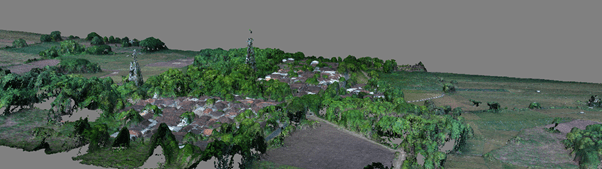
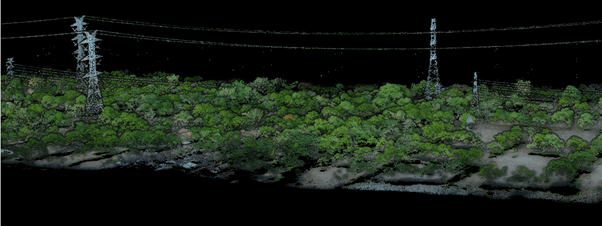
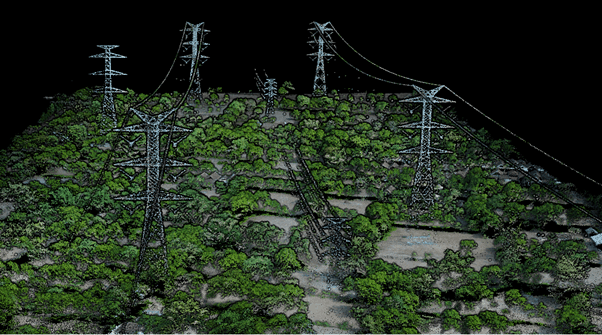
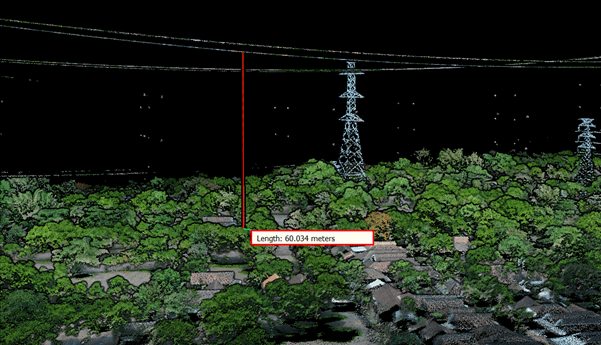
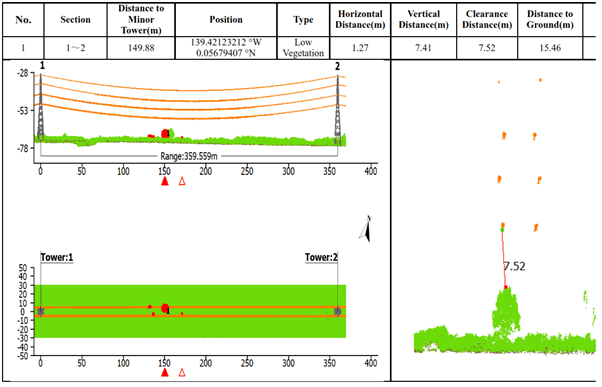
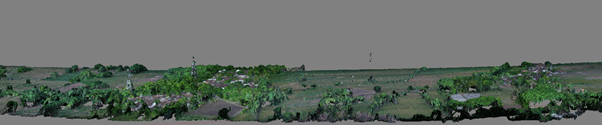
Dalam pengukuran LiDAR, presisi dan akurasi dapat dilihat dari sebaran data point cloud yang dihasilkan antar jalur terbang. Keakuratan data LiDAR dapat dilihat dari tingkat kedekatan point cloud dengan posisi aktual dari lingkungan yang dijelaskan. Sedangkan kepresisian dari data LiDAR dapat dilihat dari tingkat kekonsistenan point cloud antar jalur terbang pada titik yang sama. Sehingga, untuk mendapatkan nilai presisi ini harus dilakukan pengukuran lebih pada suatu objek. Oleh karena itu, pada saat melakukan akuisisi data lidar diperlukan pertampalan antar jalur terbang (sidelap dan overlap). Data LiDAR yang memiliki tingkat presisi yang tinggi akan menghasilkan point cloud yang lebih tipis karena memiliki jarak antar point cloud yang kecil dan memiliki sedikit noise.[2] Ilustrasi dari akurasi dan presisi dari data LiDAR dapat dilihat pada Gambar 2.

Gambar 2. Akurasi dan Presisi.[2]
Sehingga untuk mendapatkan hasil pengukuran yang mendekati nilai sebenarnya, kesalahan sistematik maupun acak harus dihindari agar tingkat akurasi dan presisi dari data yang dihasilkan memiliki kualitas yang baik.
DAFTAR REFERENSI:
[1] Ghilani, Charles D dan Wolf, Paul R. 2006. Adjusment Computations Spatial Data Analysis. United States of America.
[2] Accuracy vs Precision. https://www.yellowscan-lidar.com/knowledge/wait-accuracy-vs-precision-isnt-rocket-science/?utm_source=hs_email&utm_medium=email&utm_content=81181499&_hsenc=p2ANqtz-9lnwORNL6_GfpxQre3qYVG3_Ykh7ZPDIctygB9BjeMocx-SeKScUmQ1DfHAia-2NGsymbjAHnuo2GoSb_CU-52hPyIMZV-oNjj-oPVj6w23CPnSpk&_hsmi=81181499, diakses pada tanggal 3 Februari 2020.