Canopy Height Model (Chm) Menggunakan Survei Fotogrametri Untuk Perhitungan Tinggi Pohon
Oleh : Rabby Awalludin, ST
Kemunculan fotogrametri dengan menggunakan pesawat nirawak (UAV) menjadi jalan baru penggunaan metode fotogrametri dalam analisis lingkungan seperti lingkungan hutan dan daerah sulit terjamah oleh metode akuisisi lainnya. Jika dibandingkan dengan pengukuran fotogrametri dengan kamera metric dan penerbangan dengan ketinggian tinggi maupun dengan survey berbasis LiDAR, metode ini tetap memiliki resolusi spasial dan temporal yang tinggi [1].
CHM atau Canopy Height Model merupakan representasi dari tinggi pohon pada wilayah pengukuran. Tinggi pohon diukur melalui jarak antara ground (permukaan) dengan titik tertinggi pohon. Untuk daerah dengan tutupan lahan yang secara keseluruhannya merupakan pepohonan, tidak diperlukan tindakan lebih lanjut sebelum CHM dikalkulasi. Beda hal jika terdapat perumahan atau bangunan dalam area tersebut, untuk kondisi ini diperlukan pembersihan terlebih dahulu data tersebut.
Muncul pertanyaan, apa saja yang dapat kita lakukan dengan adanya CHM ini? Banyak pemanfaatan yang dilakukan oleh berbagai pihak dalam berbagai fungsi pemetaan dan analisis spasial (keruangan). Beberapa diantaranya sebagai berikut [2]:
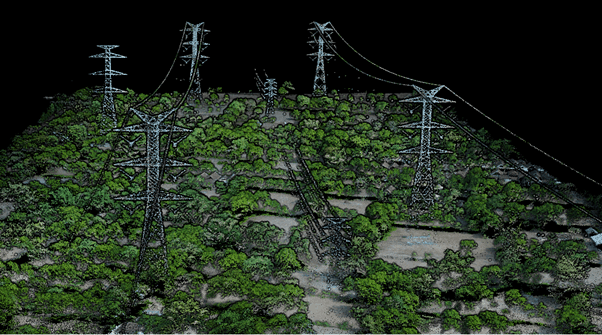
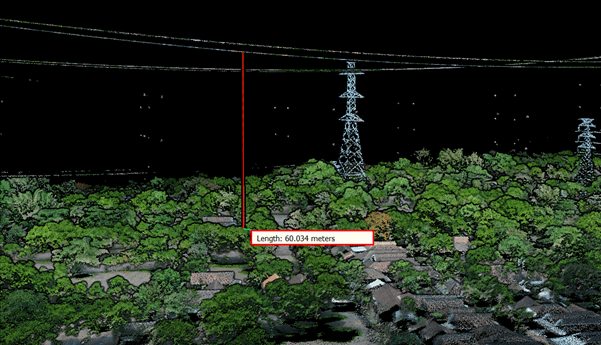
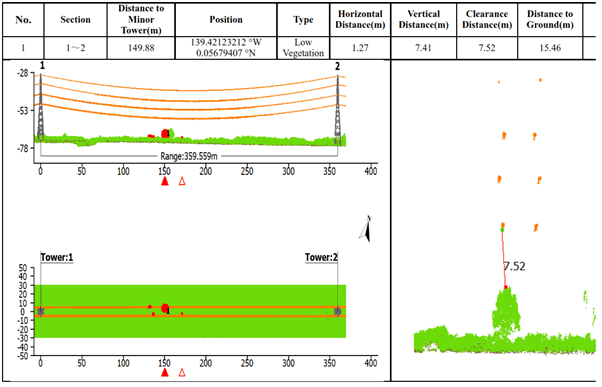
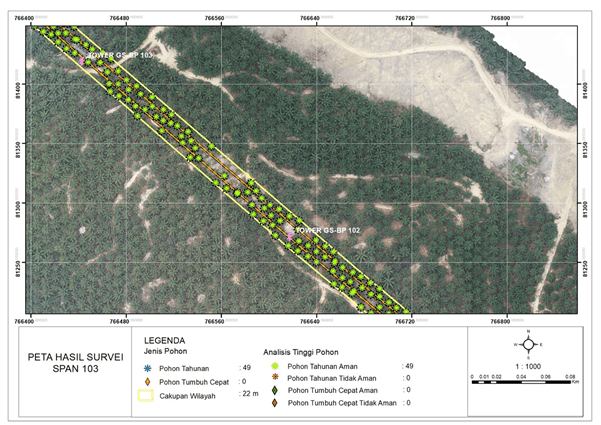
- Evaluasi resiko tinggi vegetasi terhadap saluran listrik
- Memantau penebangan dan pemulihan hutan
- Menilai kesesuaian habitat untuk satwa liar
- Mengidentifikasi lokasi pohon-pohon yang memenuhi syarat masuk dalam kategori pohon besar (klasifikasi pohon hutan)
- Mengevaluasi pertumbuhan dan perkembangan pohon hutan industri
CHM merupakan hitungan turunan dari Digital Elevation Model (DEM) dan Digital Surface Model (DSM). Nilai CHM dapat diketahui dengan banyak cara, salah satunya adalah dengan melakukan pengurangan nilai DSM oleh DEM. DSM yang merupakan representasi dari nilai ketinggian keseluruhan objek di permukaan bumi dihilangkan permukaan tanahnya (ground) oleh DEM sehingga dihasilkan nilai ketinggian dari objek yang dihitung nol dari permukaan tanah. Secara singkat perhitungan nilai CHM dilakukan dengan cara berfikir seperti berikut:
DSM – DEM = CHM
Sebelum dapat menghasilkan nilai CHM dari DSM dan DEM, tentunya terdapat beberapa langkah dan metode yang harus dipenuhi terlebih dahulu. Sebelum menghasilkan nilai DSM, diperlukan data PointCloud, yang dapat dihasilkan dengan menggunakan metode fotogrametri maupun LiDAR. Secara singkat dengan menggunakan metode fotogrametri dapat dijelaskan sebagai berikut [3]:

Dilakukan aerial triangulation untuk mendapatkan nilai posisi dan ketinggian objek dari foto-foto yang diambil dengan menggunakan metode fotogrametri. Hasil ini berupa Sparse Point Cloud yang merupakan titik jarang yang merepresentasikan posisi suatu objek.

Nilai titik jarang tersebut kemudian diperbanyak sehingga menghasilkan titik-titik dengan kerapatan padat yang disebut dengan istilah Dense Point Cloud.

Interpolasi Dense Point Cloud yang menghasilkan Digital Surface Model (DSM)

Dilakukan proses klasifikasi, otomatis maupun manual yang menghasilkan data ketinggian Ground (DEM)

Kombinasi antara DSM dan DEM sehingga menghasilkan CHM
Perhitungan nilai CHM dapat dilakukan dengan menggunakan perangkat lunak ArcGIS, Global Mapper, Simactive, dan perangkat lunak pengolahan data spasial lainnya. Perhitungan dilakukan secara otomatis dengan menggunakan bahasa pemrograman yang terdapat pada masing-masing perangkat lunak.
Nilai ketelitian dari tinggi pohon yang diperoleh dengan menggunakan CHM dapat diperoleh dengan cara membandingkan beberapa sampel yang sama antara CHM dan data lapangan yang dipilih secara acak. Nilai ketelitian dari CHM sangat berpengaruh terhadap beberapa faktor, diantaranya:
· Nilai GSD (Ground Sample Distance)
Seperti yang kita ketahui bersama, nilai GSD merupakan ukuran resolusi piksel dari hasil foto udara, baik foto udara dengan kamera metrik maupun foto udara dengan kamera non metrik. Model permukaan bumi terbentuk dari data elevasi digital dalam tiga dimensi (X, Y, Z). Data elevasi digital ini disimpan dalam format piksel grid (raster). Setiap piksel mempunyai nilai elevasi yang mewakili ketinggian titik di permukaan bumi. Semakin besar nilai GSD pada foto udara, maka resolusi spasial yang dihasilkan akan semakin rendah, dan tingkat kedetailan dari objek-objek pada foto udara akan semakin berkurang [4]. Jika GSD yang digunakan besar (resolusi rendah), nilai tinggi yang direpresentasikan oleh CHM menjadi buruk. Hal ini dipengaruhi dengan besarnya GSD, nilai tertinggi sebenarnya dari pohon tidak dapat didefinisikan dengan jelas. Sehingga representasi hasil tinggi kurang atau tidak mendekati nilai tinggi sebenarnya di lapangan.
· Kualitas GCP
Kualitas Ground Control Point atau GCP juga ikut andil dalam ketelitian dari CHM yang dihasilkan. GCP berpengaruh dalam menentukan kedekatan posisi termasuk posisi horizontal dan vertikal dari objek pengamatan dalam hal ini pohon. Semakin baik kualitas GCP, maka akan semakin baik pula posisi dari objek pengamatan, yang secara langsung juga berpengaruh terhadap nilai CHM yang dihasilkan.
· Nilai Pembanding
Nilai ketelitian hasil suatu metode didapatkan dengan membandingkan dengan hasil metode lainnya. Namun nilai pembanding tersebut harus memiliki nilai yang lebih dipercaya sehingga jika hasil metode yang dibandingkan semakin mendekati pembanding, maka metode tersebut dapat digunakan. Misalkan nilai CHM dibandingkan dengan hasil pengukuran lapangan. Metode perhitungan yang dilakukan dalam pengukuran lapangan haruslah metode yang memiliki nilai kepercayaan yang dapat dipertanggungjawabkan dengan baik.
Jonathan Lisein, Stephanie Bonnet and Philippe Lejeune dari Universitas Liege – Gembloux Agro-Biotech melakukan penelitian mengenai ketelitian CHM dengan menggunakan metode fotogrametri dengan pesawat nirawak (UAV) yang dibandingkan dengan pengukuran tinggi di lapangan [3] . Didapatkan hasil seperti pada tabel berikut :
| Resolusi/GSD | RMSE |
| 25cm | 2.1m |
Dari hasil yang didapatkan, dapat ditarik kesimpulan berupa:
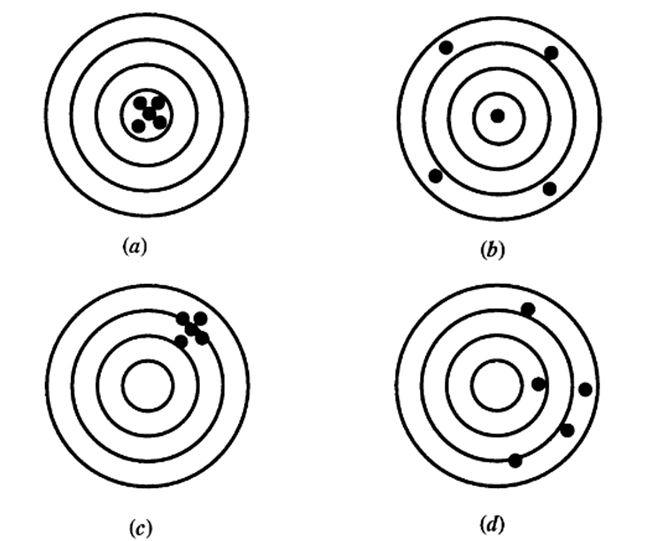
- Penggunaan DEM dengan resolusi rendah dan akurasi yang tidak diketahui merusak nilai presisi dari DSM itu sendiri.
- Rekonstruksi Tiga Dimensi pohon rapat dengan menggunakan foto bergantung pada kuat dan arah angin yang menyebabkan pergerakan daun, serta pengulangan bentuk pada kanopi hutan yang padat dan berdaun lebar, keduanya dapat menghambat/membingungkan dalam proses pembentukan dense point cloud.
- Hasil co-registrasi DSM dan DTM untuk kawasan hutan tidak ketat secara ilmiah, karena kurangnya visibilitas tanah (tinggi vegetasi = 0) pada DSM.
- Penggunaan fotogrametri untuk kawasan hutan rentan terhadap error, karena nilai tanah dibawah pohon tidak terlihat.
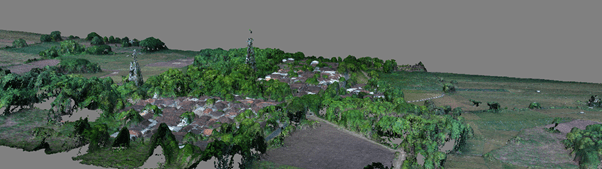
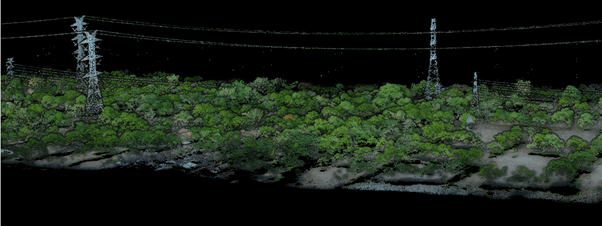
Kerapatan point cloud dapat mempengaruhi ketelitian dari nilai tinggi yang dihasilkan. Dapat terlihat pada gambar berikut:

Secara keseluruhan, metode menentukan ketinggian pohon (CHM) dengan menggunakan metode survei fotogrametri cukup efektif dan efisien jika dilakukan untuk menghasilkan data dengan ketelitian yang cukup baik. Untuk dapat memastikan layak atau tidaknya metode ini dilakukan, diperlukan pemilihan metoda akuisisi dan pengolahan data yang tepat seperti proses klasifikasi point cloud, spesifikasi alat, nilai GSD yang digunakan, metode pembanding yang digunakan, penggunaan parameter dalam pengolahan data pada perangkat lunak pengolahan data yang digunakan, dsb.
Sumber Referensi :
[1] Watts A.C., Ambrosia V.G., Hinkley E.A. [2012]. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing 4 (6), 1671–1692.
[2] https://www.earthdefine.com/spatialcover_chm/
[3] https://orbi.uliege.be//bitstream/2268/129781/1/ModeleNumCanopee_drone_poster.pdf
[4] https://www.handalselaras.com/ground-sampling-distance-gsd/